
现代游戏引擎 - 游戏中渲染管线、后处理和其他的一切(七)
环境光遮蔽(Ambient Occlusion)
在之前的章节中,我们提到过对于阴影的处理,但有一种阴影是难以通过这种方式来处理的——物体自身局部对光线的遮挡,
比如人物眼角对皮肤、鼻子对面部的遮挡阴影。虽然从理论上来说,这种阴影也符合光照方程,但由于其局部遮挡的特性,
在统一的光照模型处理中很难得到较好的效果。 Ambient Occlusion
Ambient Occlusion
预计算环境光遮蔽(Precomputed AO)
Precomputed AO思想是将AO信息存储在角色纹理中,这样即使我们没有AO真正对应的网格结构,
也可以有较好的AO效果。这也是现在很多商业项目使用的方法。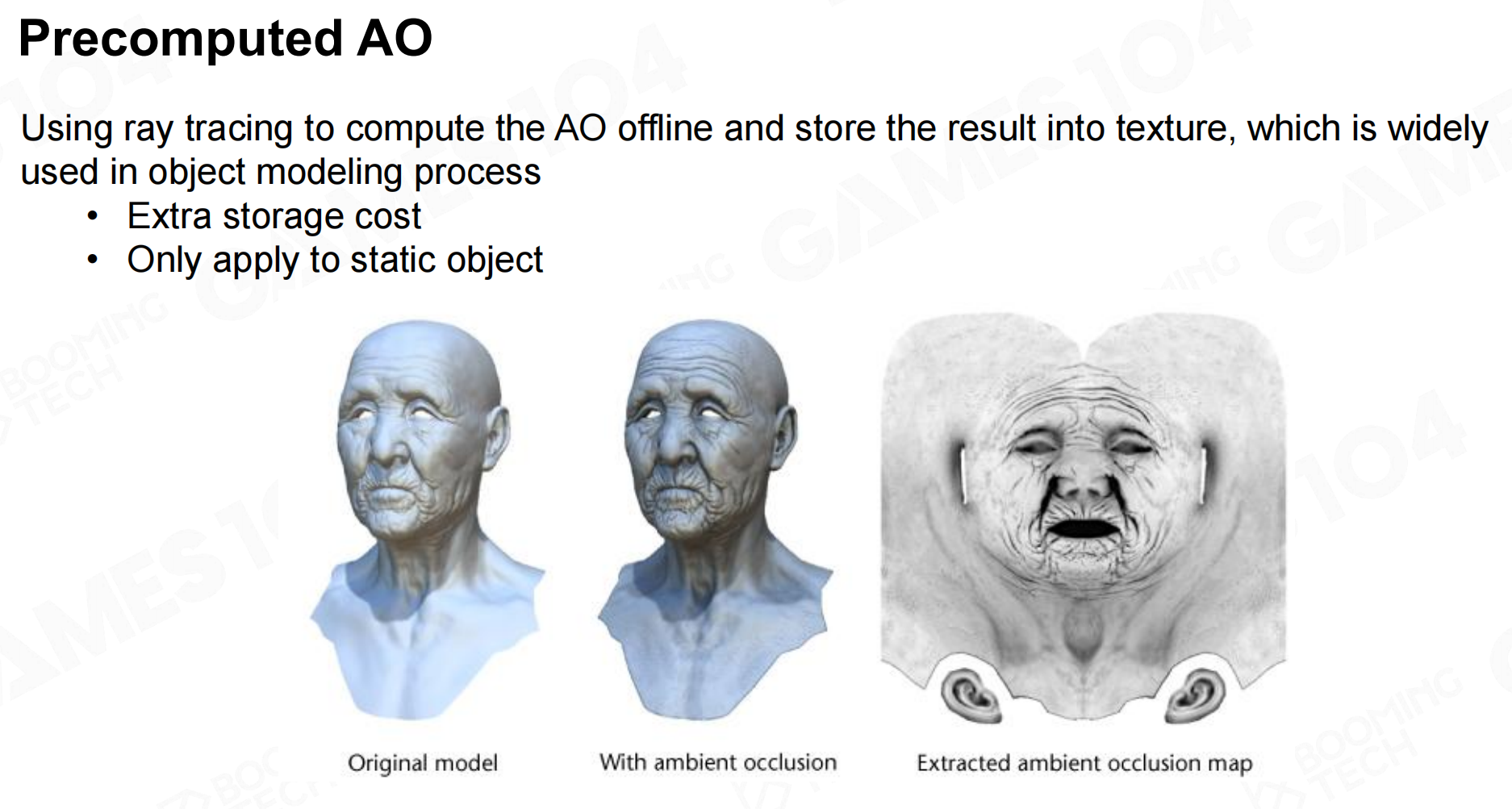 Precomputed AO
Precomputed AO
其特点也很明显:
- 无需几何上的遮蔽关系;
- 需要额外的纹理存储信息;
- 只能处理静态对象。
屏幕空间环境遮挡(Screen Space Ambient Occlusion+ - SSAO+)
SSAO的思想是将是对屏幕像素进行局部空间采样,计算点可显示的概率,作为最终颜色的比例系数。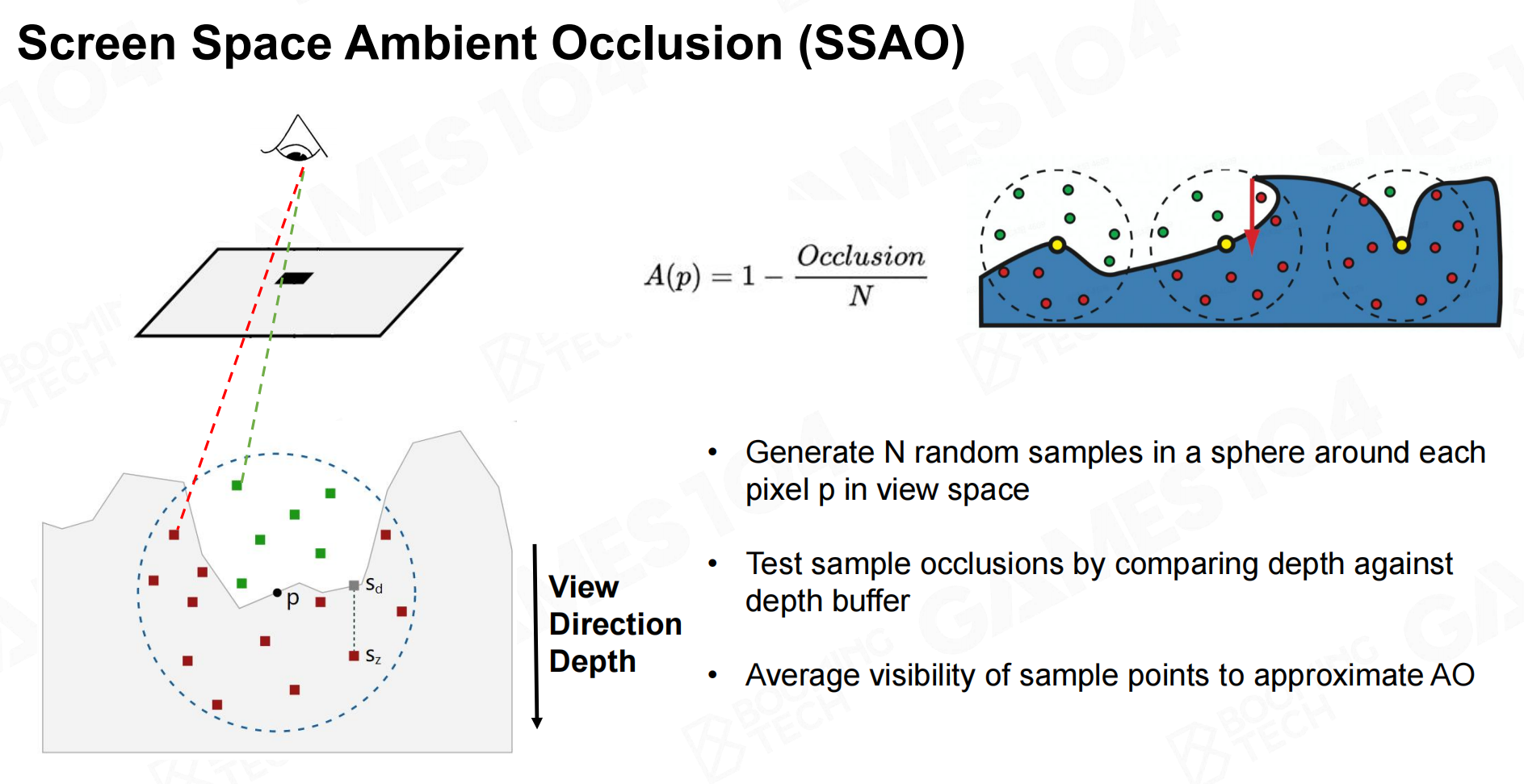 SSAO
SSAO
SSAO采样时使用的是球体区域采样,但实际我们看到一个平面时,可视区域只有半球。因此对其进行优化后改为SSAO+的方式进行处理:
- 沿法线方向在视图空间生成半球面;
- 多次区域采样,判断是否被遮蔽,计算颜色衰减比例。
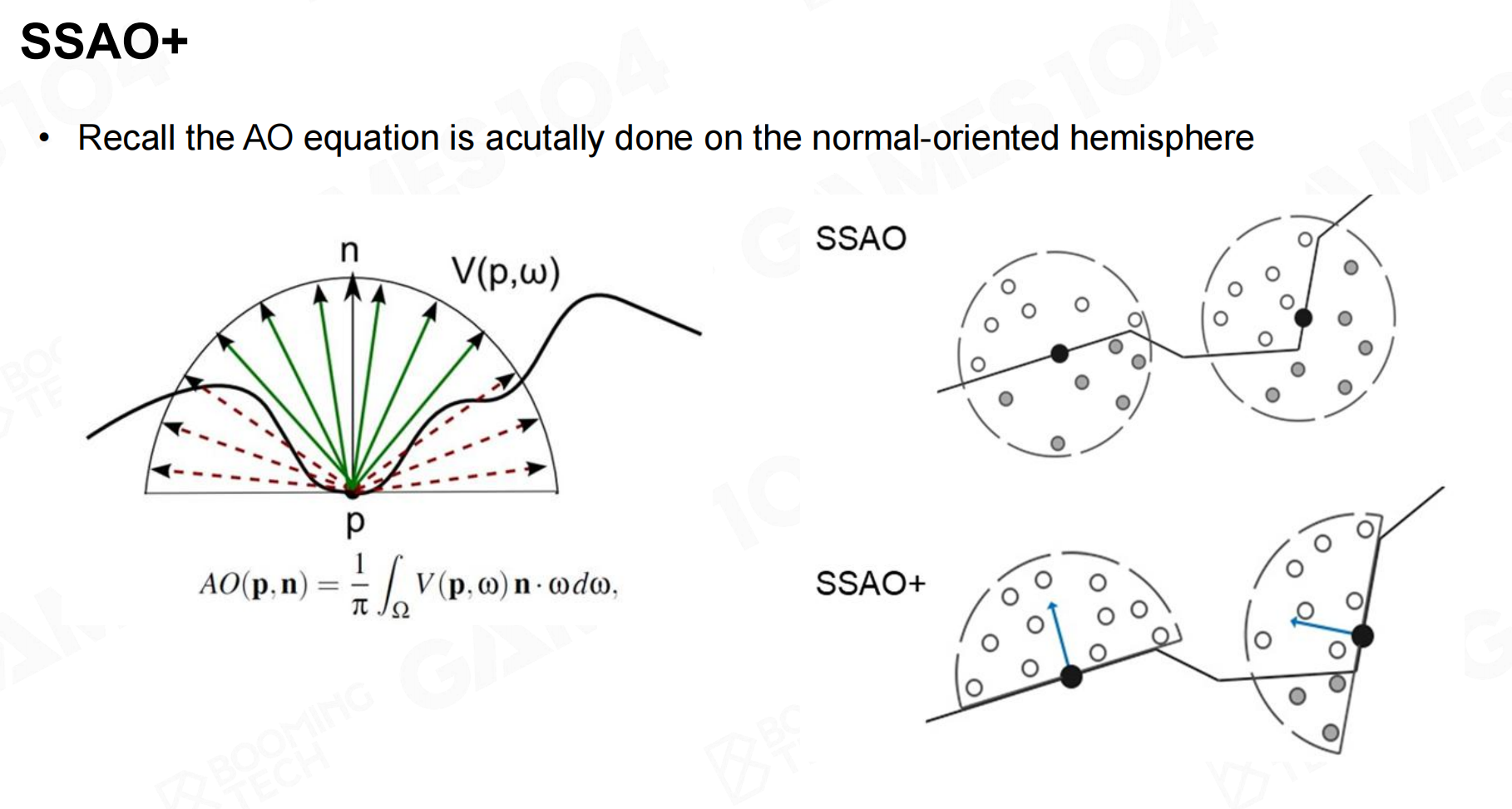 SSAO+
SSAO+
相比Precomputed AO优点:动态处理AO效果
相比Precomputed AO缺点:
- 实时计算量较大;
- 需要有真实的遮蔽结构;
- AO判断错误(当一个像素覆盖的深度很大也就是距离摄像机很远时,用球面进行采样计算覆盖的区域很大,很可能不是局部遮挡关系了,
不应该进行处理。屏幕空间没有几何信息,因此无法判断采样区域内的对象关系,应该可以设定阈值进行一定的优化)
基于地平线的环境光遮蔽(Horizon-basedAmbient Occlusion - HBAO)
HBAO假设各个方向上的光贡献相同(这也是算法的缺陷),对SSAO+在计算衰减比例上做了简化:区域采样点计算比例 => 积分切面最大仰角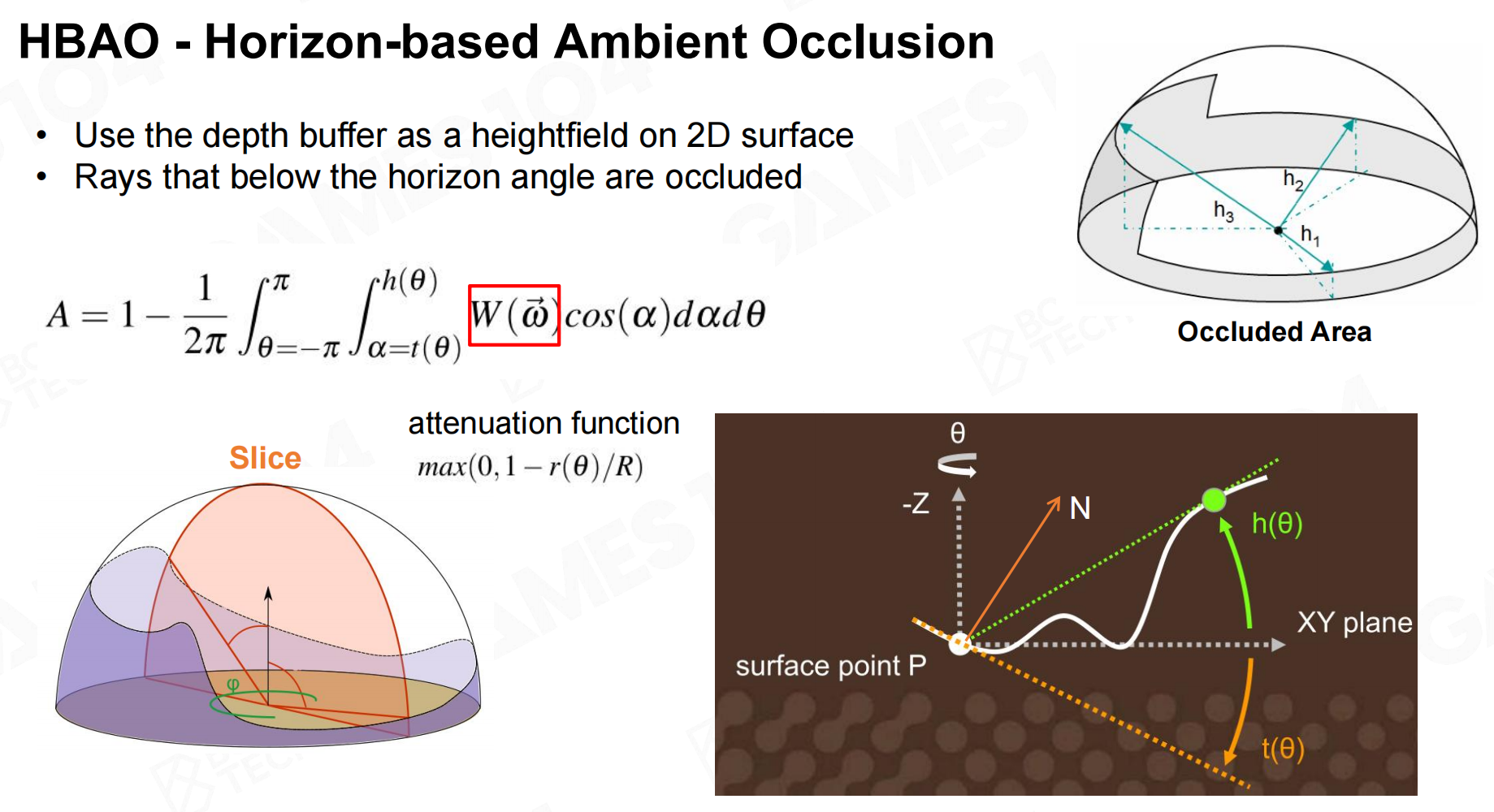 HBAO
HBAO
基于地面实况的环境遮挡(Ground Truth-based Ambient Occlusion - GTAO)
具体来说,GTAO在HBAO的基础上移除了随着距离衰减的可见性函数,转而使用一个常量1作为可见性(不过恢复了正常积分中的光线与法线之间的余弦项),
为了避免硬切导致的瑕疵,会考虑添加一个从一个较大的距离到最大的采样半径上使用一个从1到0的线性混合权重。为了模拟near-field的interreflection,
则是通过对多个具有代表性的场景在不同的albedo作用下的GI跟AO之间的数值关系进行匹配映射,得到了两者之间的关系的解析模拟解。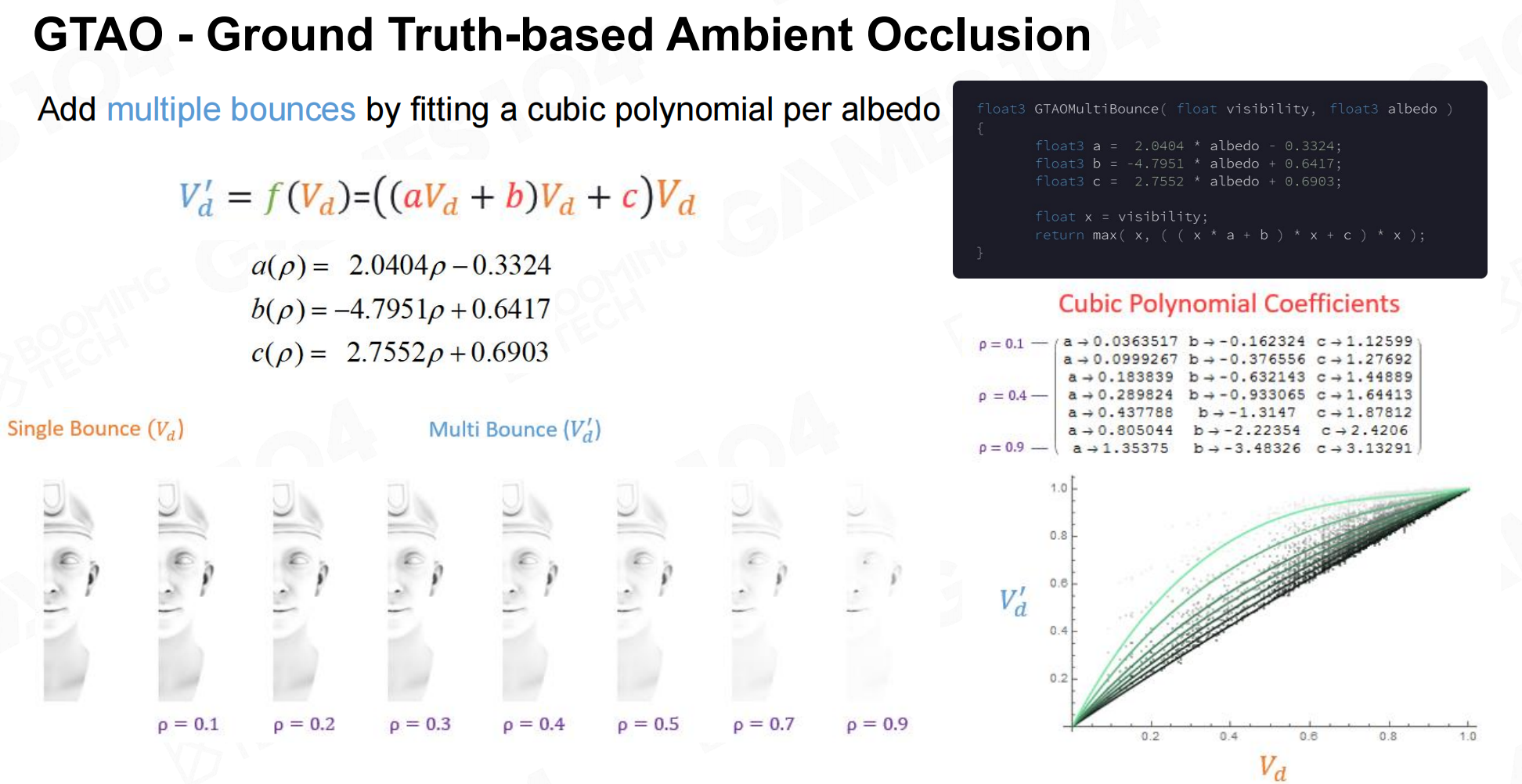 GTAO
GTAO
光线追踪环境光遮蔽(Ray-Tracing Ambient Occlusion)
基于RTX的硬件,每个像素发出一些射线来进行遮蔽检测来计算AO情况。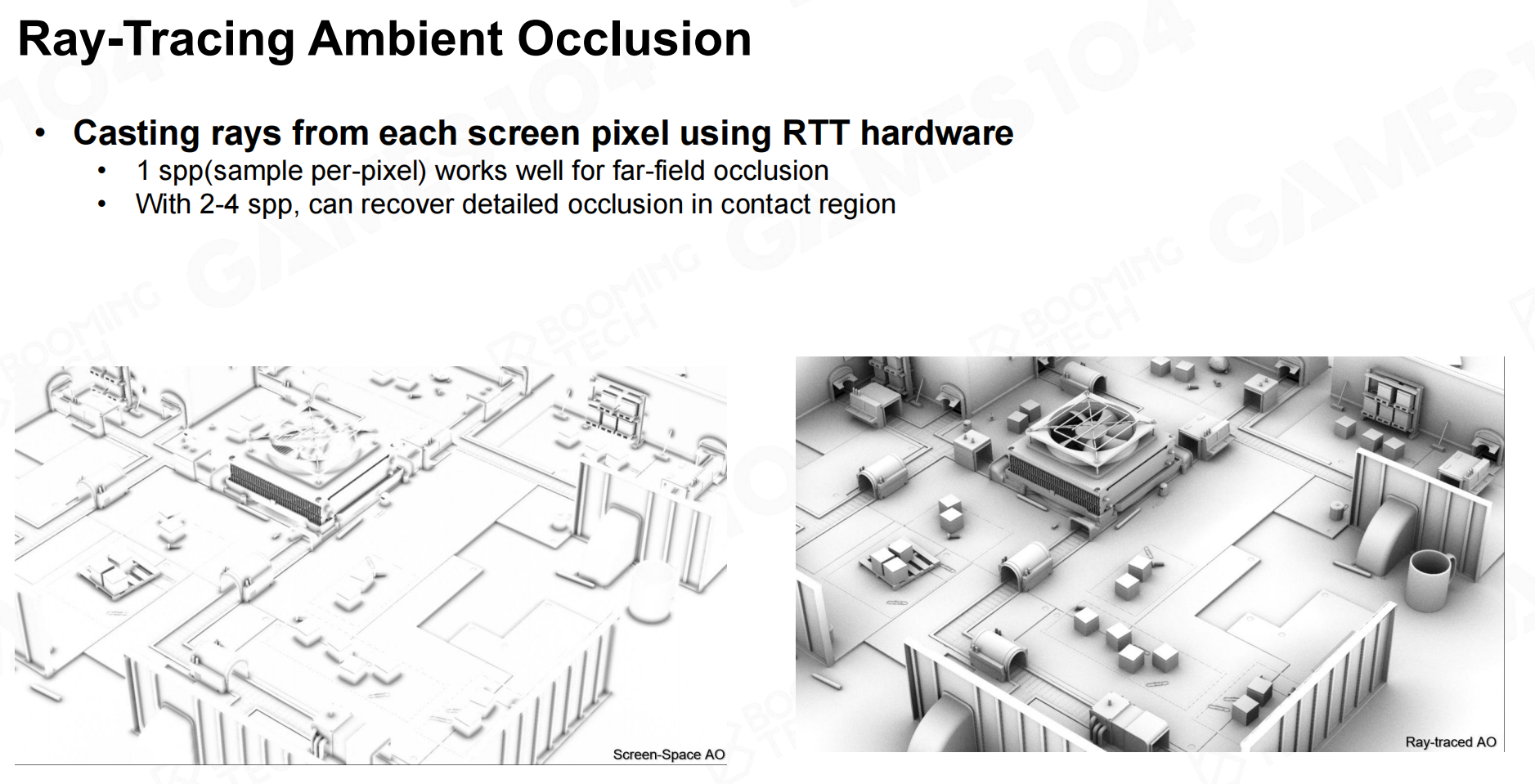 Ray-Tracing Ambient Occlusion
Ray-Tracing Ambient Occlusion
雾效(Fog)
Fog越浓,透明度约低。
深度雾效(Depth Fog)
Depth Fog假设空间中充满了均匀的Fog,那么我们就只需要根据Depth缓冲就可以计算看到物体的透明度了。
常见的Fog透明度计算方式有三种:线性、指数、指数平方(最常用)。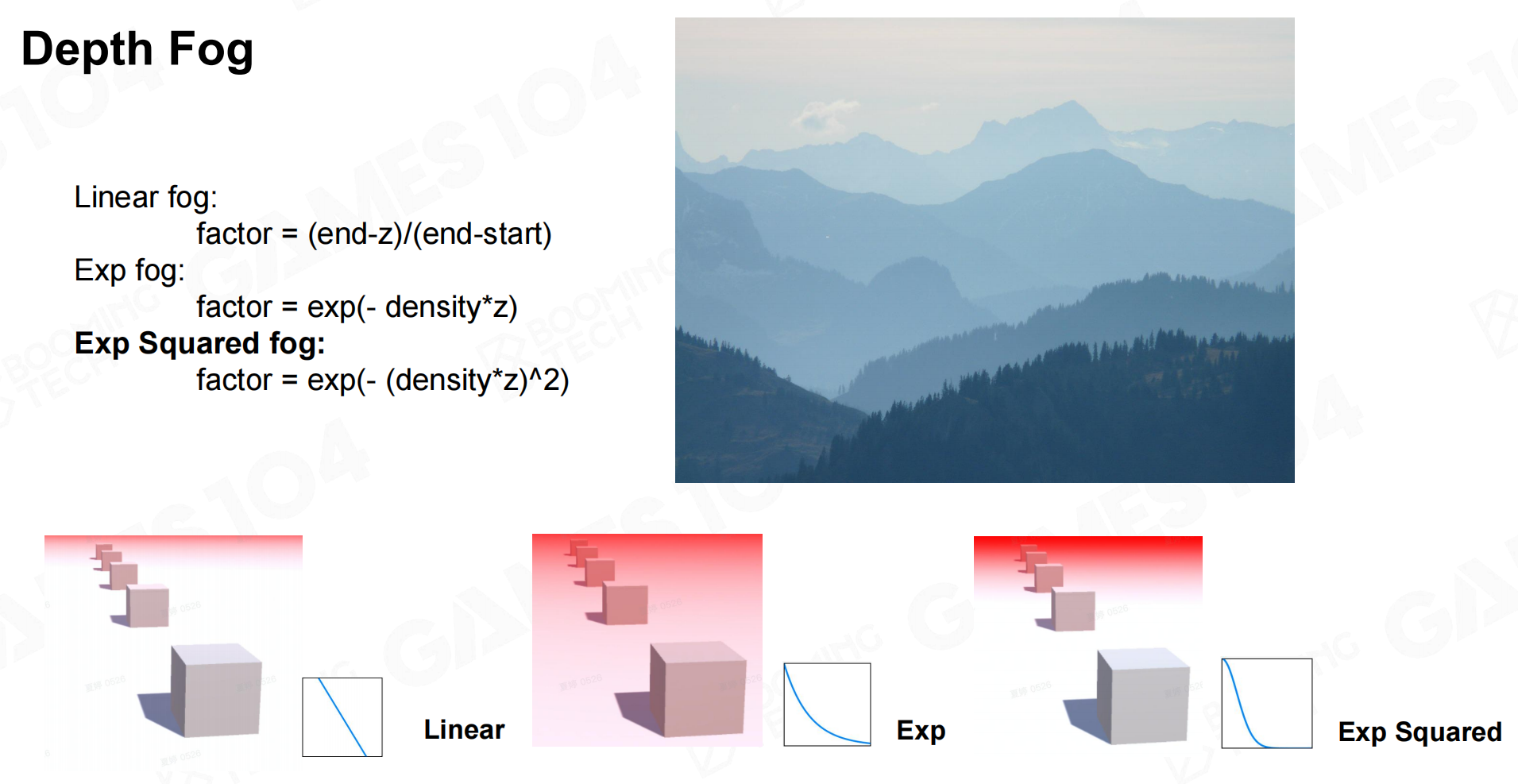 Depth Fog
Depth Fog
高度雾效(Height Fog)
Height Fog用来处理与高度相关的Fog,例如从山脚向上看,可以看到雾效;但在山顶缺看不到雾效。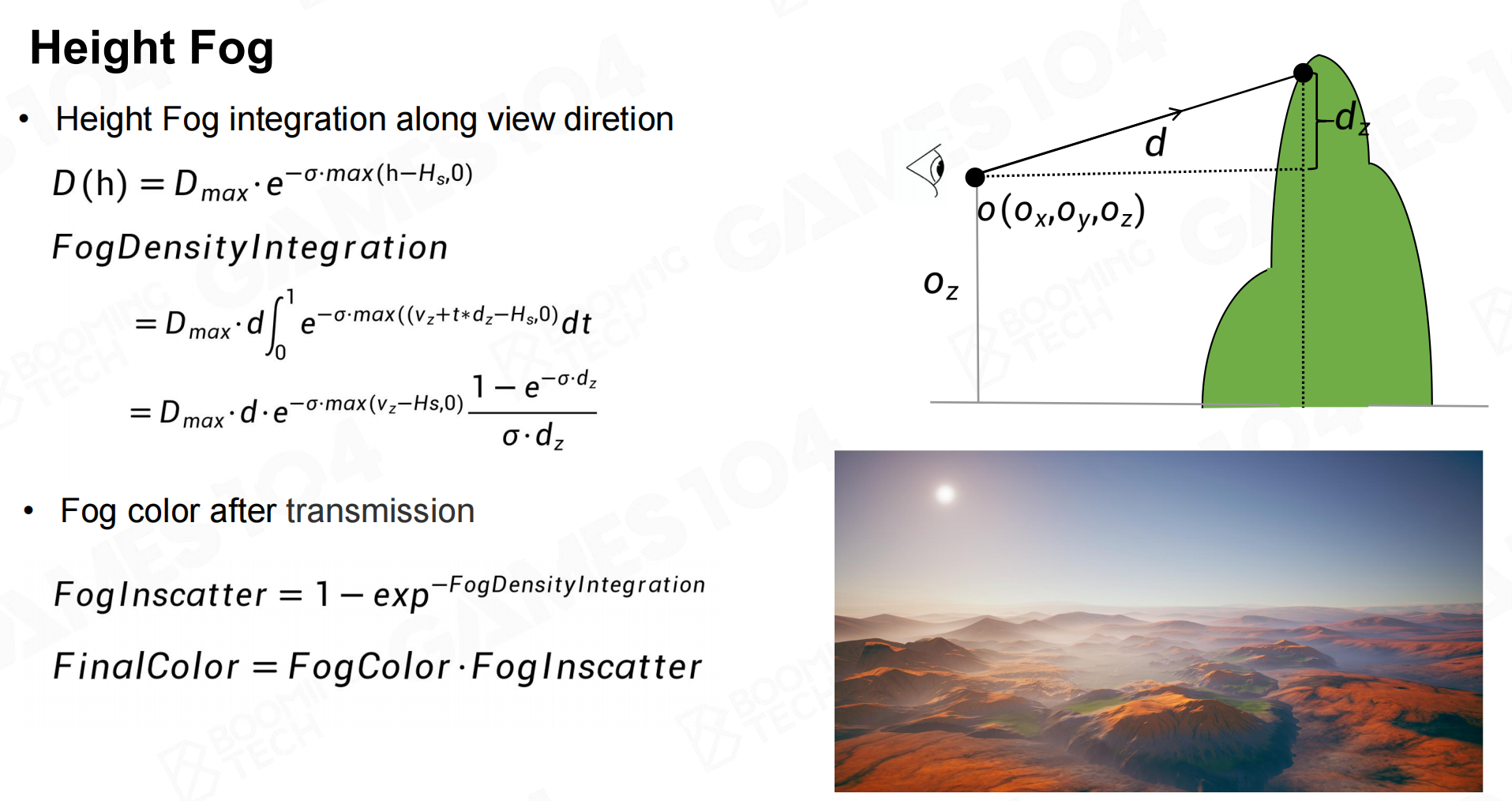 Height Fog
Height Fog
体积雾(Volumetric Fog)
以上两种方式的Fog都是在屏幕空间进行处理的,这样有些效果就难以处理了,比如幽暗的环境,一束光透过fog。这就需要体积雾来处理了。
体积雾根据视锥与摄像机的远近,对空间进行划分(近处密)。对切分后的视锥进行Ray Matching等计算,处理方式与云的处理类似。 Volumetric Fog
Volumetric Fog
抗锯齿
走样的原因:想要表达的东西太细,但是采样频率不足。大概分为三类:
- 边缘的采样
- 纹理的采样
- 高光的采样
 走样的原因
走样的原因
Anti-aliasing
常用解决方案就是:多采样获取更多的样本,然后对样本进行加权和求和,以产生一个像素颜色 Anti-aliasing
Anti-aliasing
Super-sample AA (SSAA) and Multi-sample AA (MSAA)
SSAA是通过绘制一个高分辨率的图像做一下滤波变成低分辨率的结果,处理步骤如下:
- 在一个像素内取若干个子采样点;
- 对子像素点进行颜色计算(采样);
- 根据子像素的颜色和位置,利用一个称之为resolve的合成阶段,计算当前像素的最终颜色输出
MSAA优化了SSAA的着色次数:每个像素只着色一次,根据子像素覆盖情况,将着色的数据复制到相应的Color位置。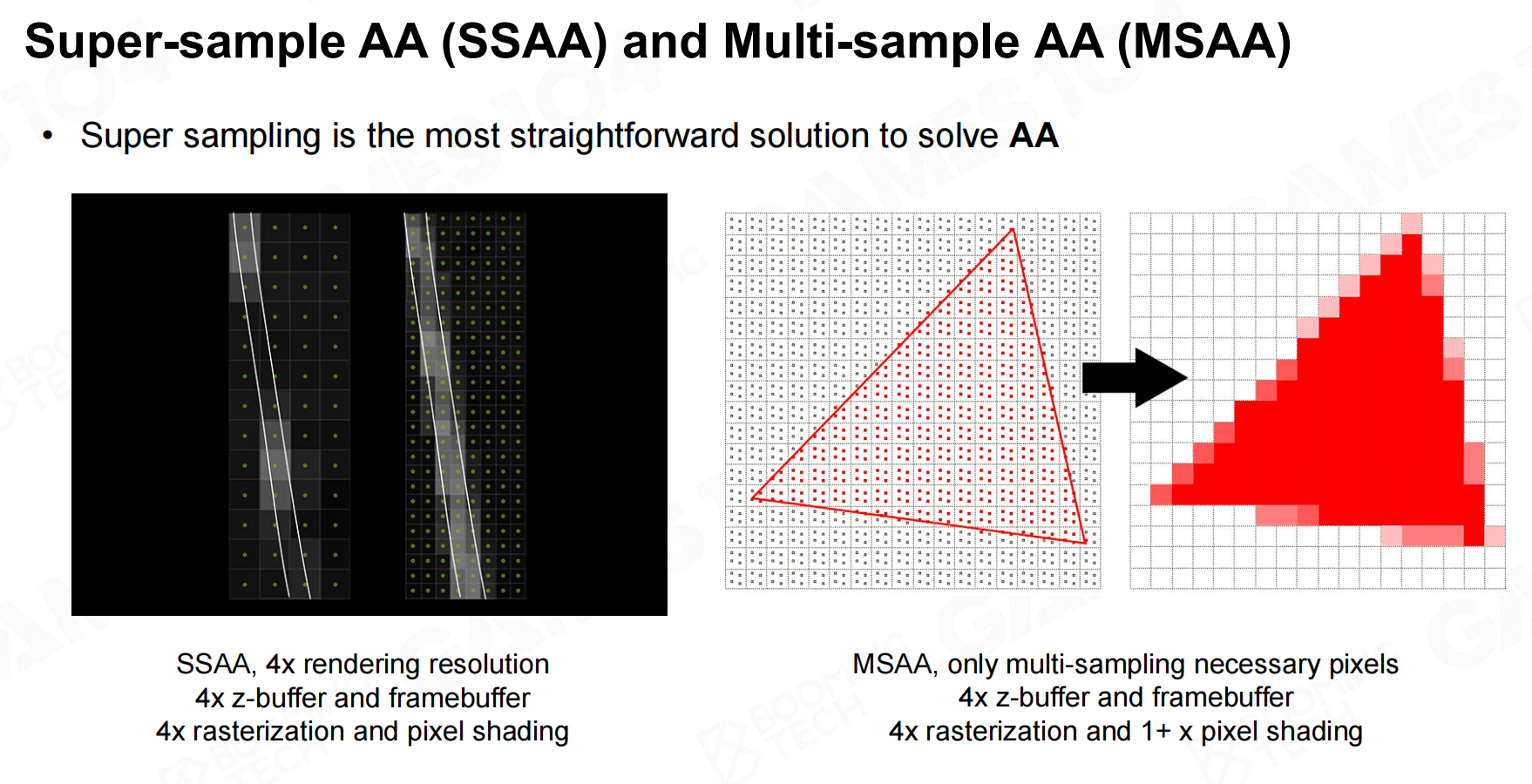 SSAA and MSAA
SSAA and MSAA
FXAA(Fast Approximate Anti-aliasing)
核心思想:提取边缘像素;将边缘像素与周围像素混合。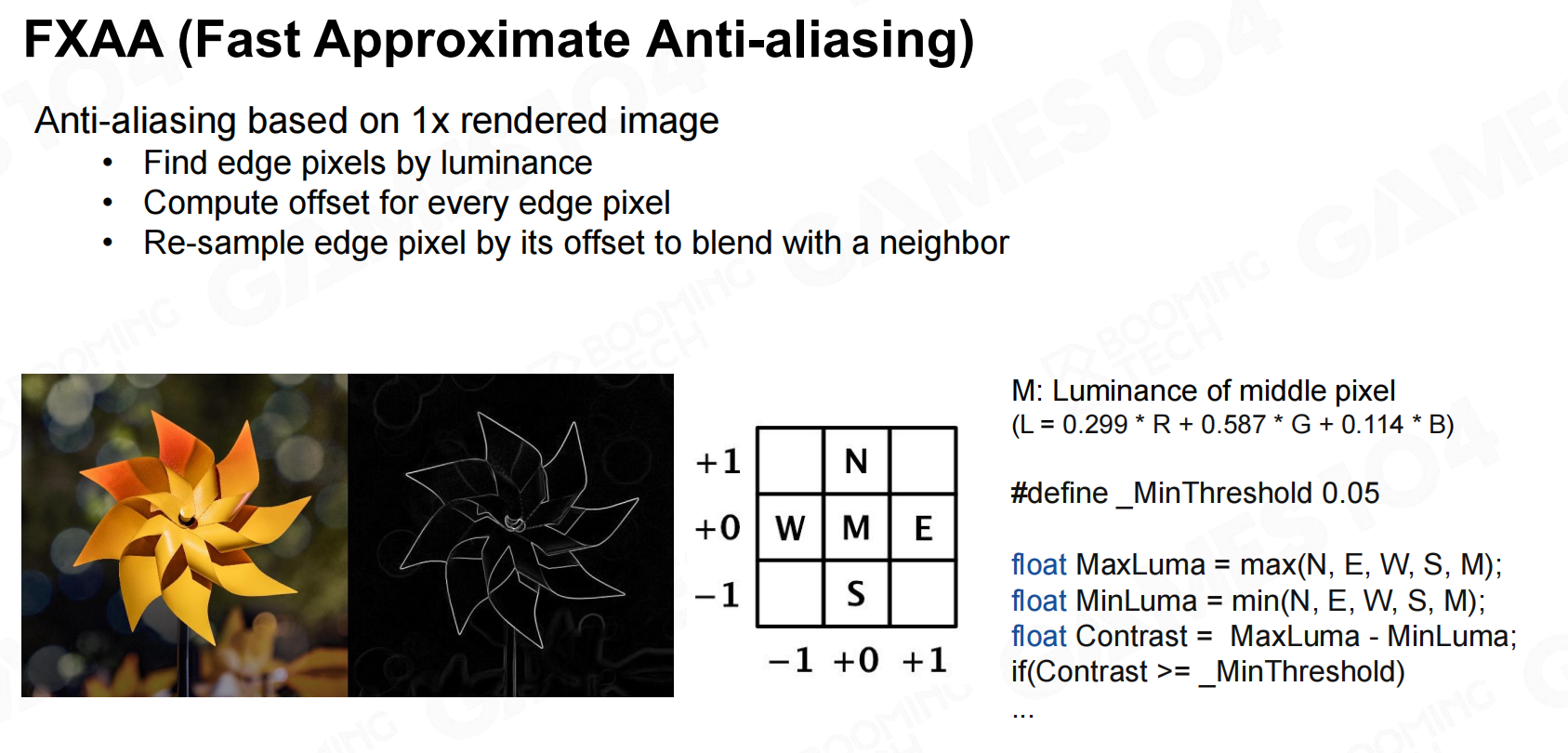 FXAA
FXAA
为了判断边缘像素法线方向,通常会计算自身以及周围像素(8个)亮度,计算其中最大值与最小值之差作为判断依据。
(亮度不同的地方,以不同的阈值判断,缓解局部高频信息丢失)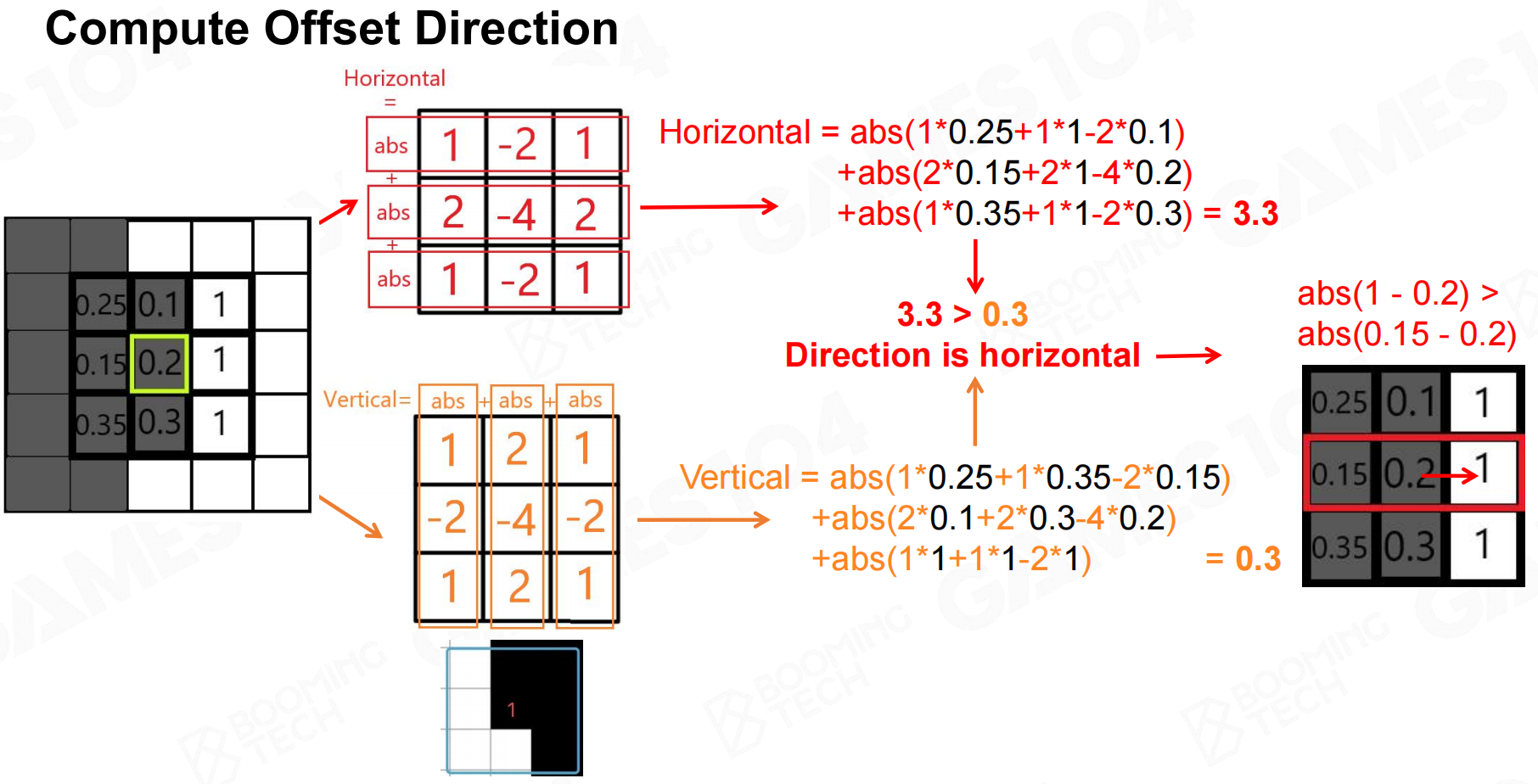 卷积计算偏移方向
卷积计算偏移方向
在确定像素边缘方向之后,就需要进一步确定边缘的法线方向。处理思路如下:若边缘为水平方向,则判断上下像素与自身像素亮度的差值;
若边缘为垂直方向,则判断左右像素与自身像素亮度的差值。(法线朝向亮度变化大的方向)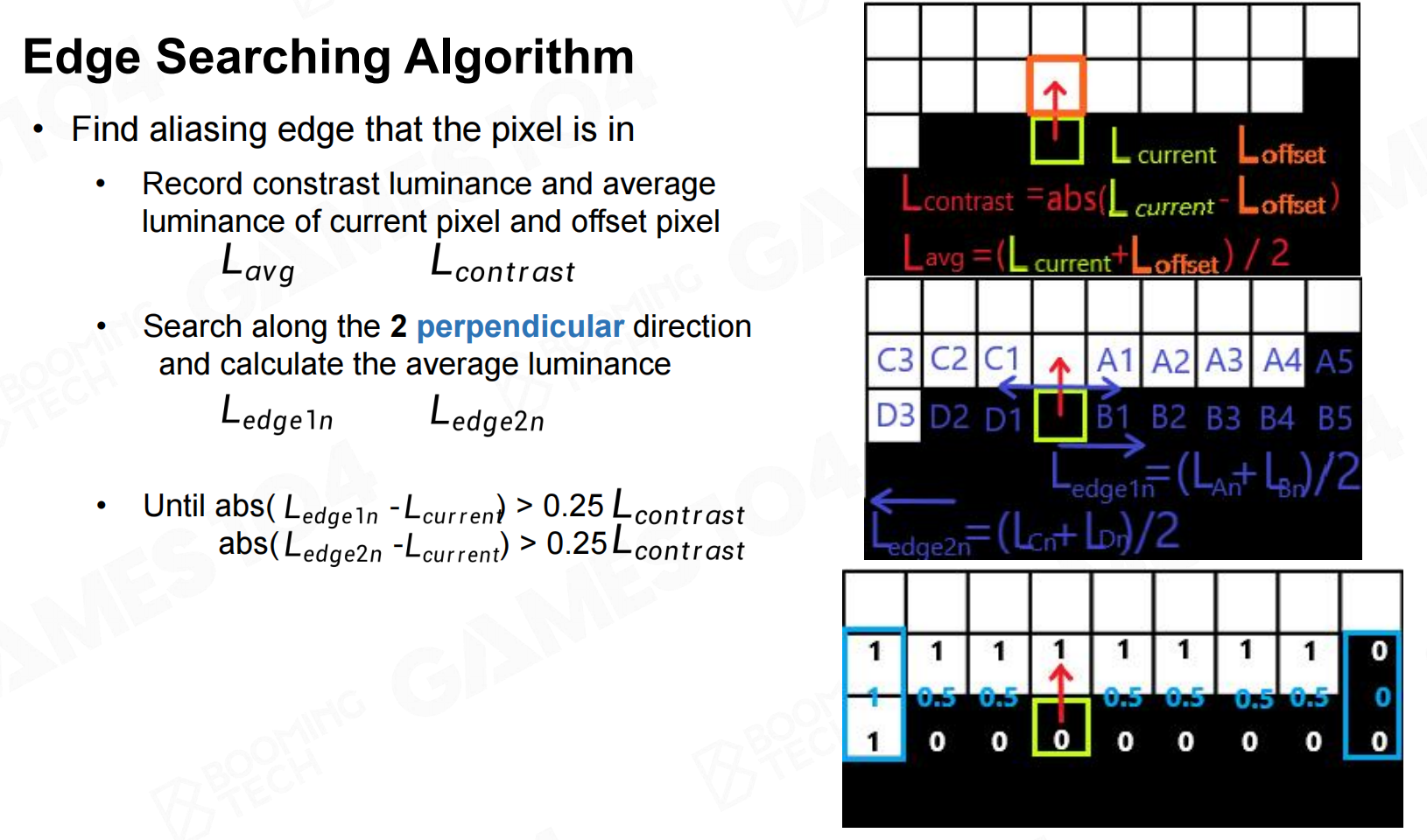 边缘搜索算法
边缘搜索算法
FXAA算法在颜色混合时,首先会计算当前像素处于边线中的比例位置。然后根据比例位置,对当前像素的uv做偏移。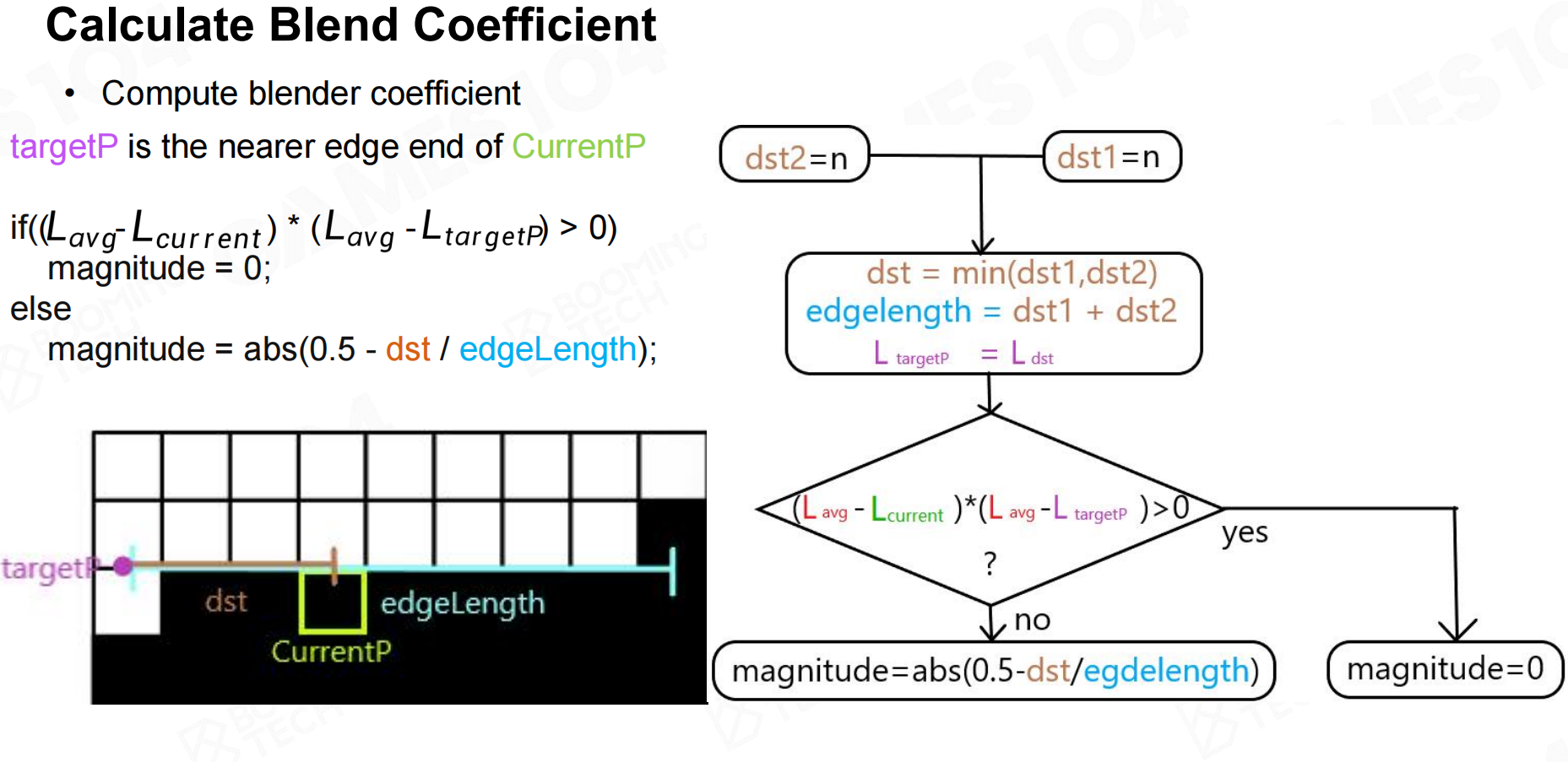 计算混合系数
计算混合系数
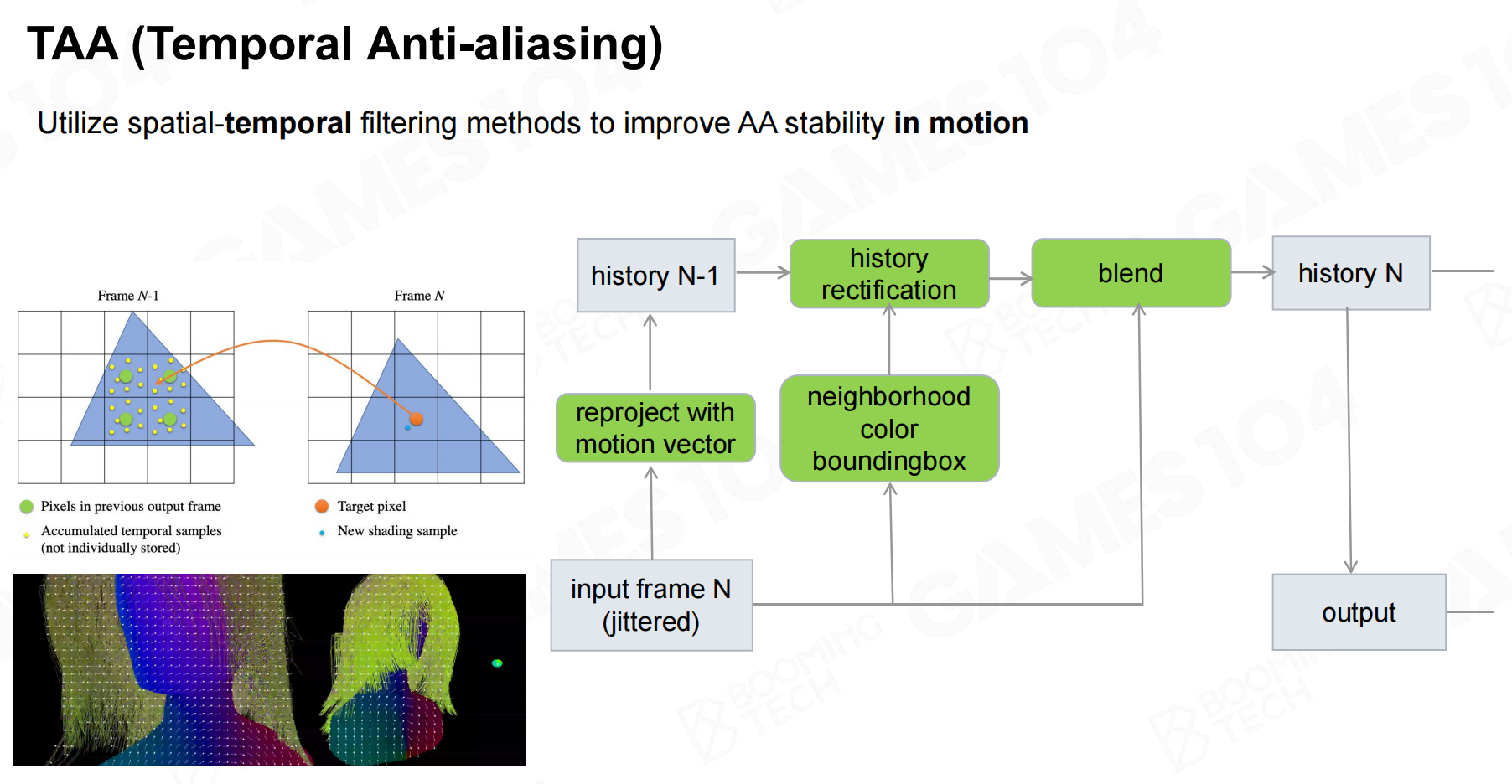
TAA(Temporal Anti-aliasing)
TAA分为采样(sampling)和合成(resolve)两个过程。
- 采用:常见的做法是在每帧中对摄像机的视锥体矩阵做偏移,以达到多次采样的效果。
- 合成:为了避免采样的像素差异过大,使用Motion Vector:计算像素点在当前帧和上一帧的移动,
在融合时进行差异判断,放弃掉那些颜色差异大的历史像素点
这种采样方法存在很多问题:
- 由于舍弃了历史像素,会出现部分顶点闪烁。
- 当前画面的像素点与上一帧的矩形像素点有偏移,插值合成导致了像素的模糊。
- Ghosting问题:光照变化或物体运动,导致历史样本失效;
- 骨骼动画、顶点动画需要额外计算处理
 TAA
TAA
后处理
后处理:在Camera渲染完成之后,拿到渲染的纹理再对其进行处理。通常后处理是用来保证画面正确以及特殊效果
,但我们之前提到的SSAO、Depth Fog其实也算是在后处理流程中实现的。这里简单介绍一下常见的后处理效果。
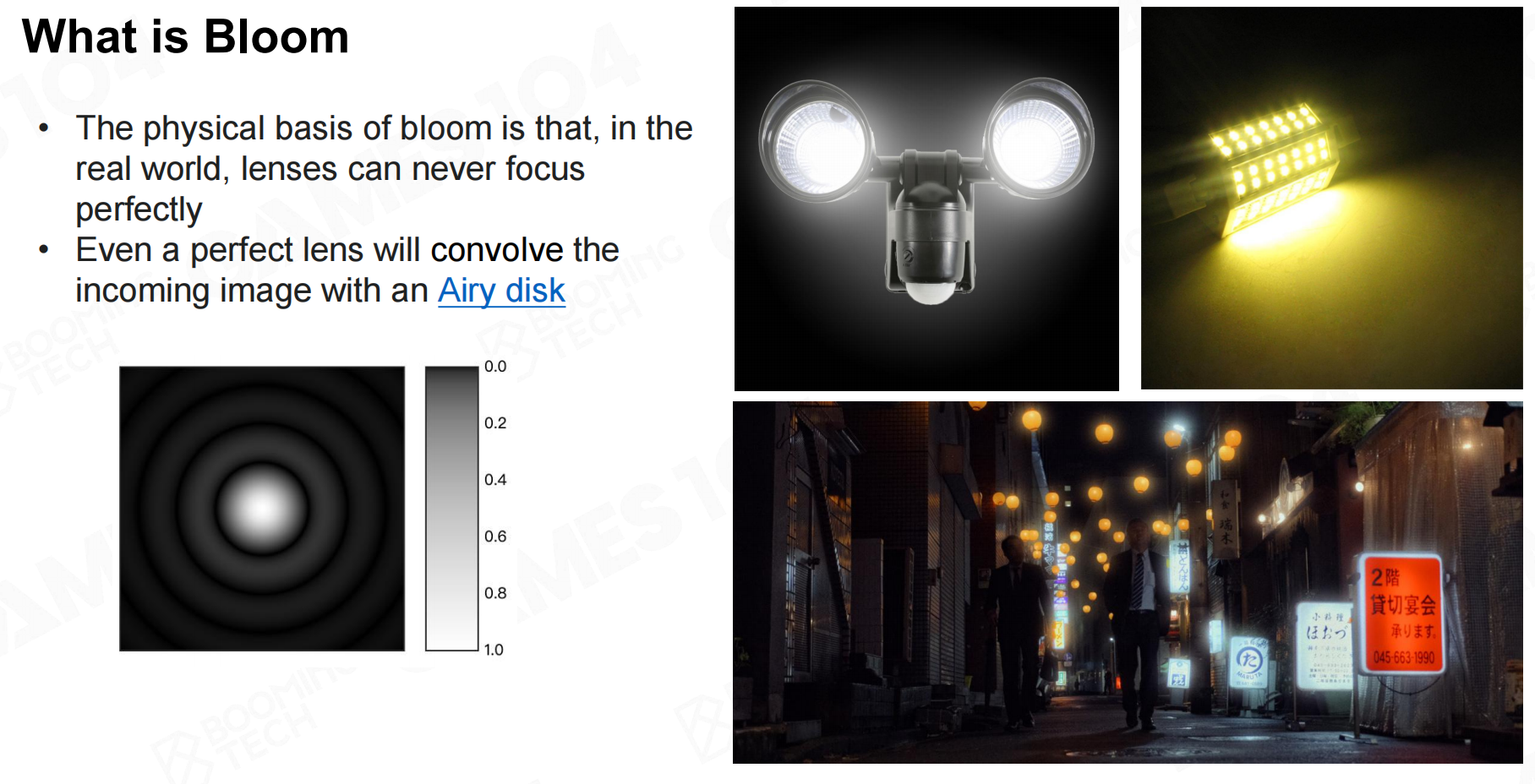
光晕(Bloom)
现实中,我们看到的强光源时,周围会有一圈光晕,Bloom就是为了处理这类效果。
Bloom的产生:
- 相机透镜不能完美聚焦
- Airy disk,光会在眼里产生散射
 光晕
光晕
处理步骤
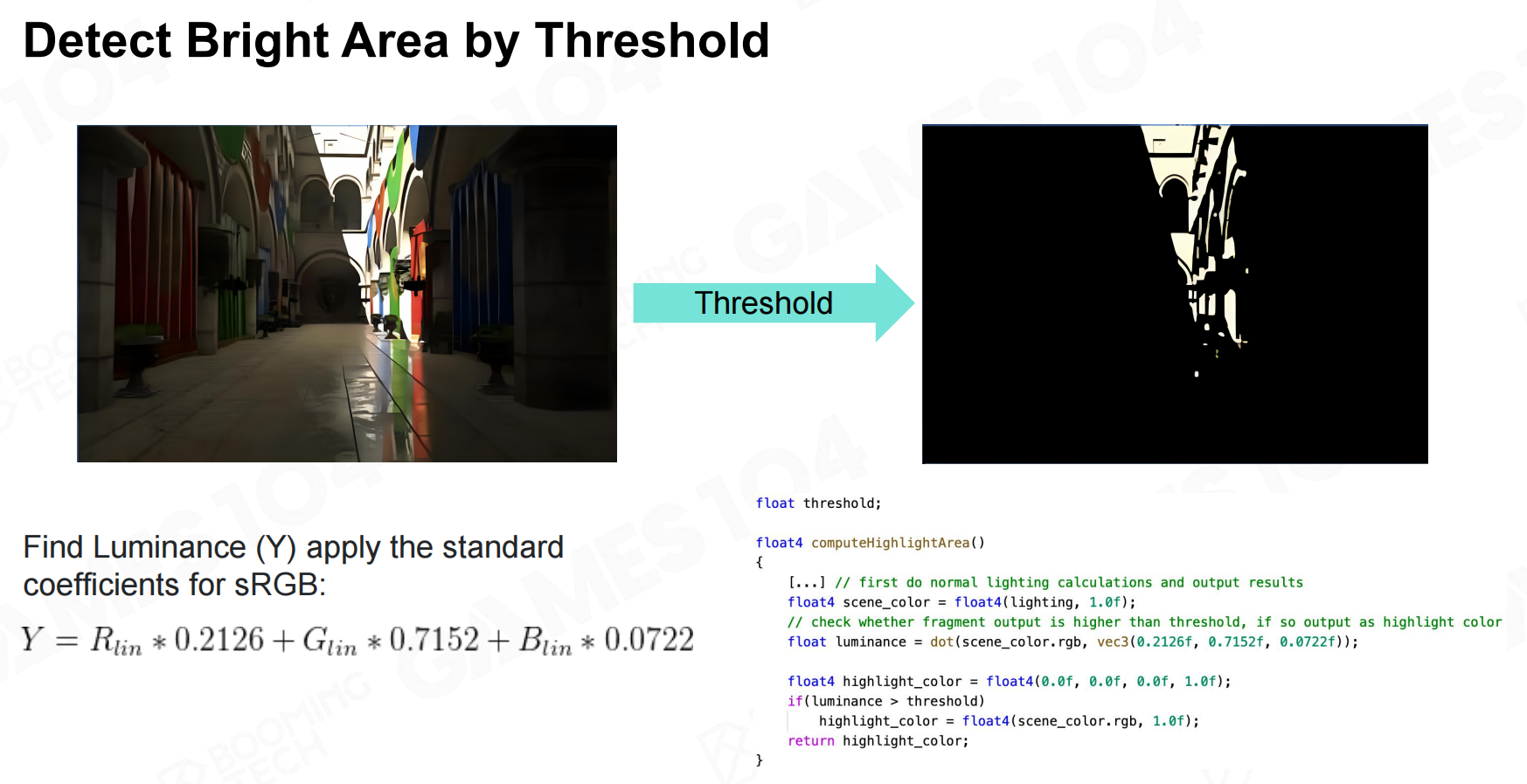 提取高亮区域
提取高亮区域
利用高斯模糊与低阶亮度对所提取的亮度区域进行模糊处理,以达到高效计算。然后将模糊化的亮度图与原图以一定比例进行叠加。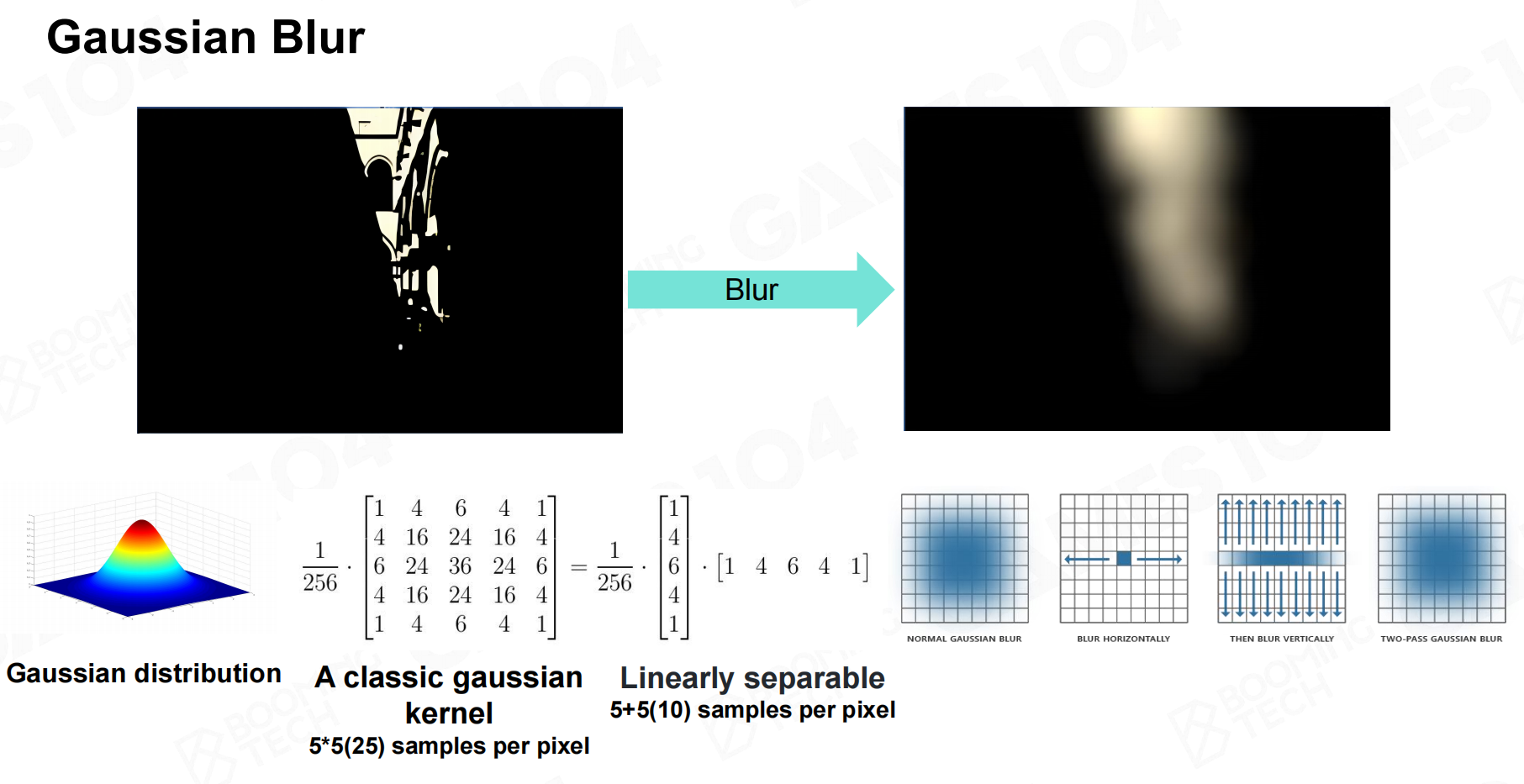 高斯模糊
高斯模糊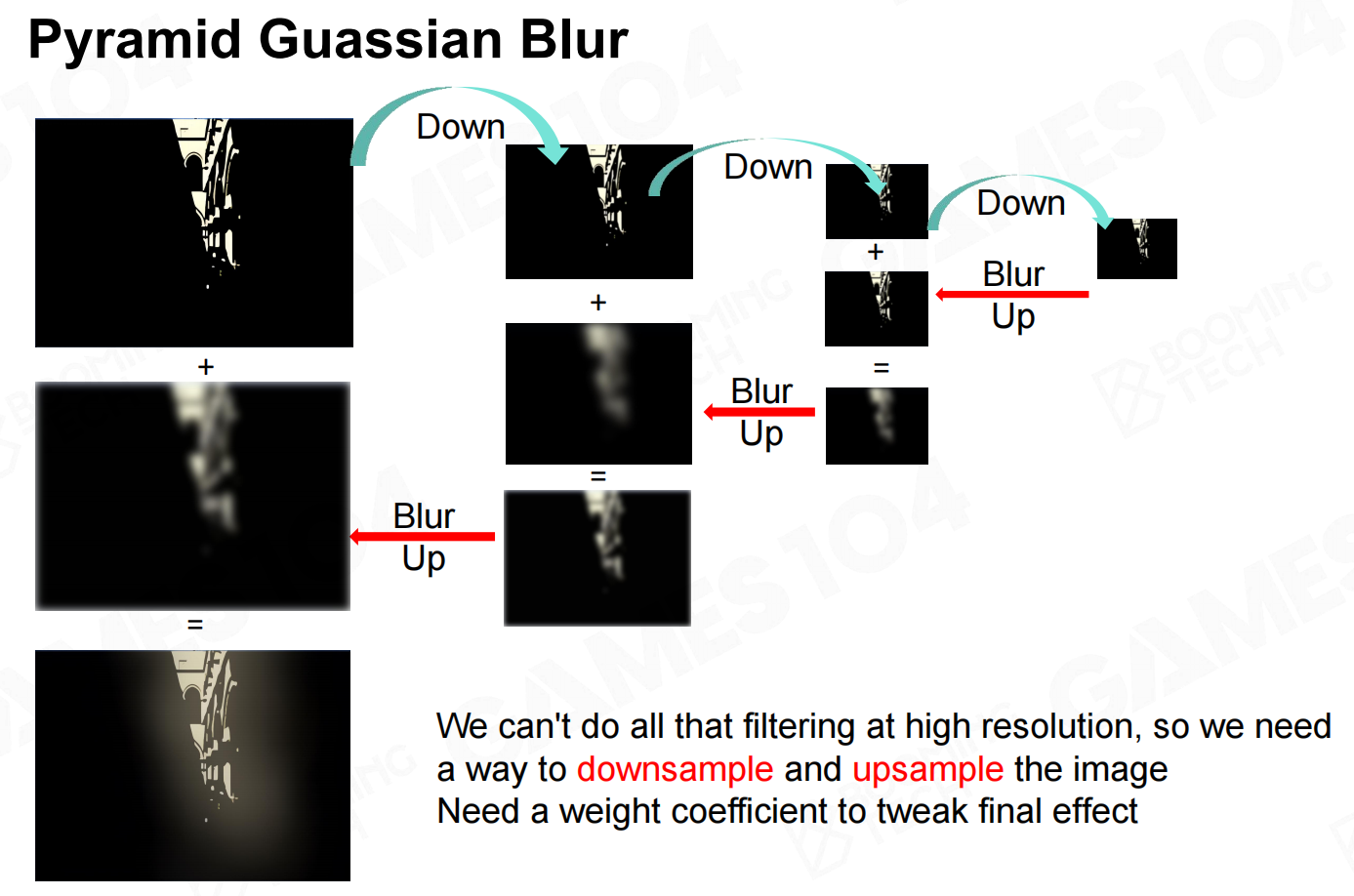 高斯滤波金字塔
高斯滤波金字塔
色调映射(Tone Mapping)
自然界中亮度范围很大,但我们用来显示的设备亮度范围是有限的。若不对颜色做任何处理,但显示的颜色亮度超出显示上限时就会被截断,产生过曝显现。
为了处理这一问题,就需要Tone Mapping将显示的颜色映射到显示器能够处理的亮度范围内。
颜色的映射方案就是Tone Mapping的核心(Tone Mapping Curve)。
Filmic s-curve
Filmic s-curve是行业早期剔除的颜色映射曲线,提出者在大量实践基础上进行参数化拟合。其效果然游戏画质有了极大提升。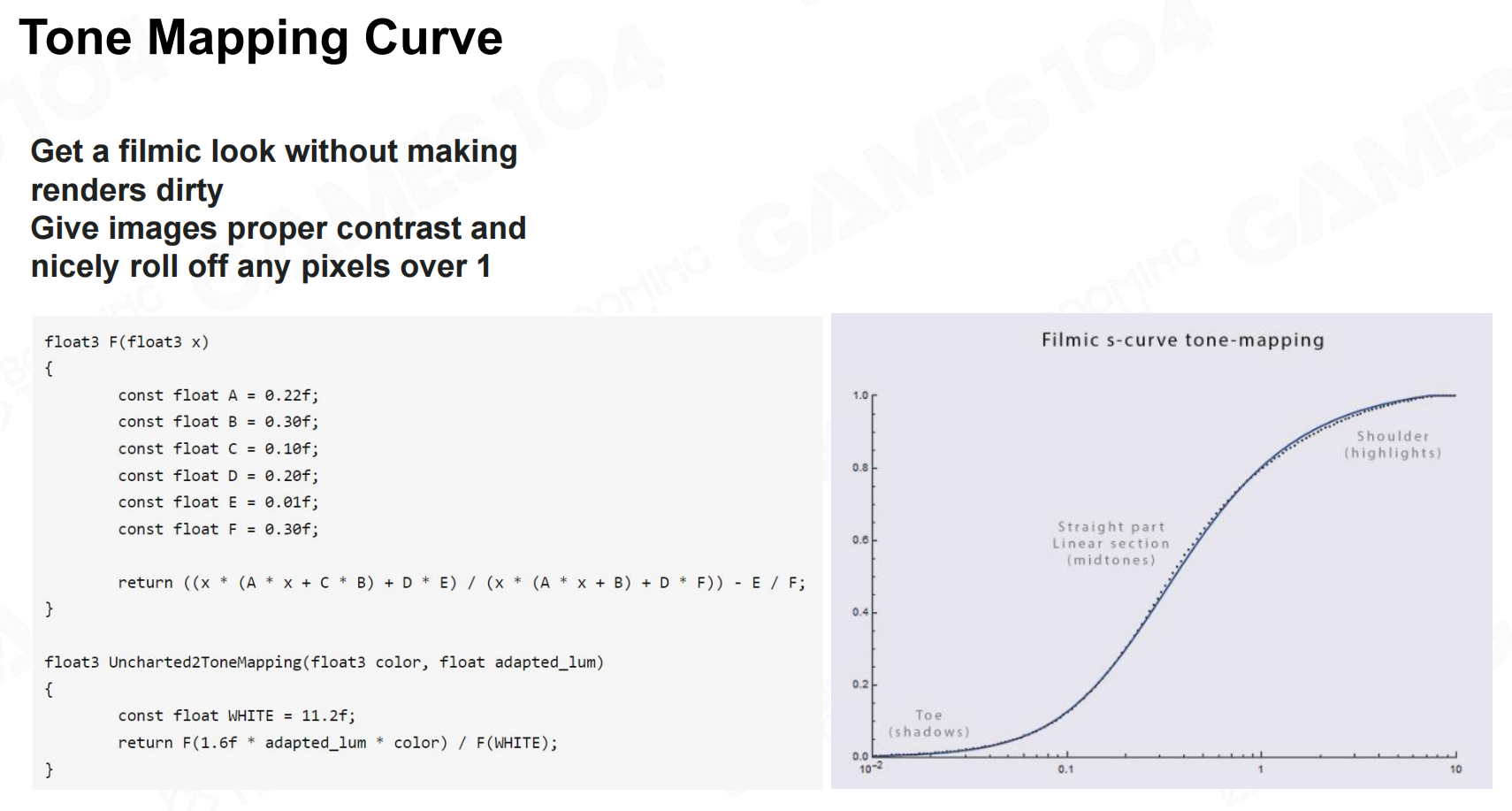 Filmic s-curve
Filmic s-curve
ACES
ACES是目前最被认可的颜色曲线,能够有效得在各种终端有稳定的显示效果。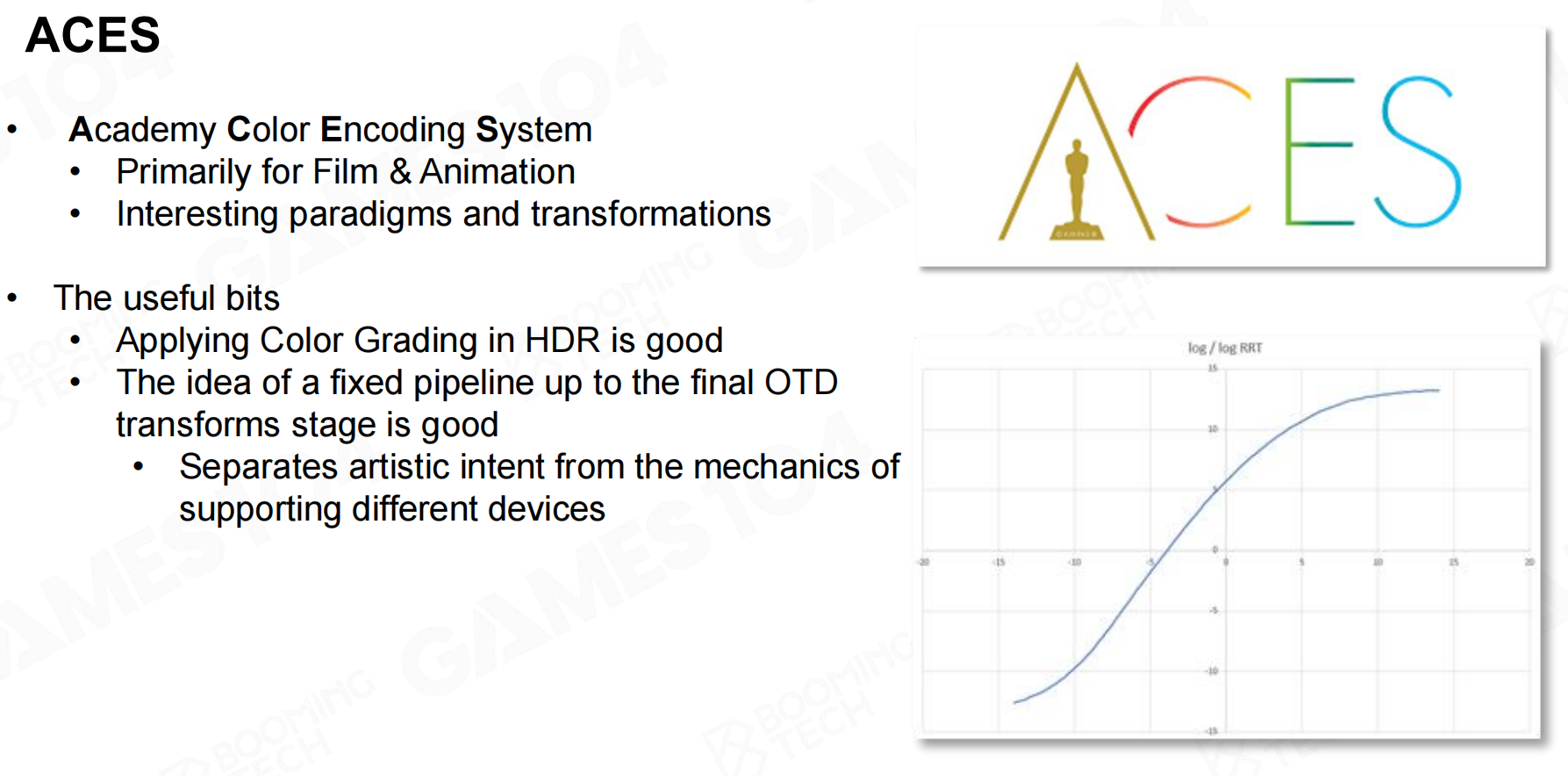 ACES
ACES
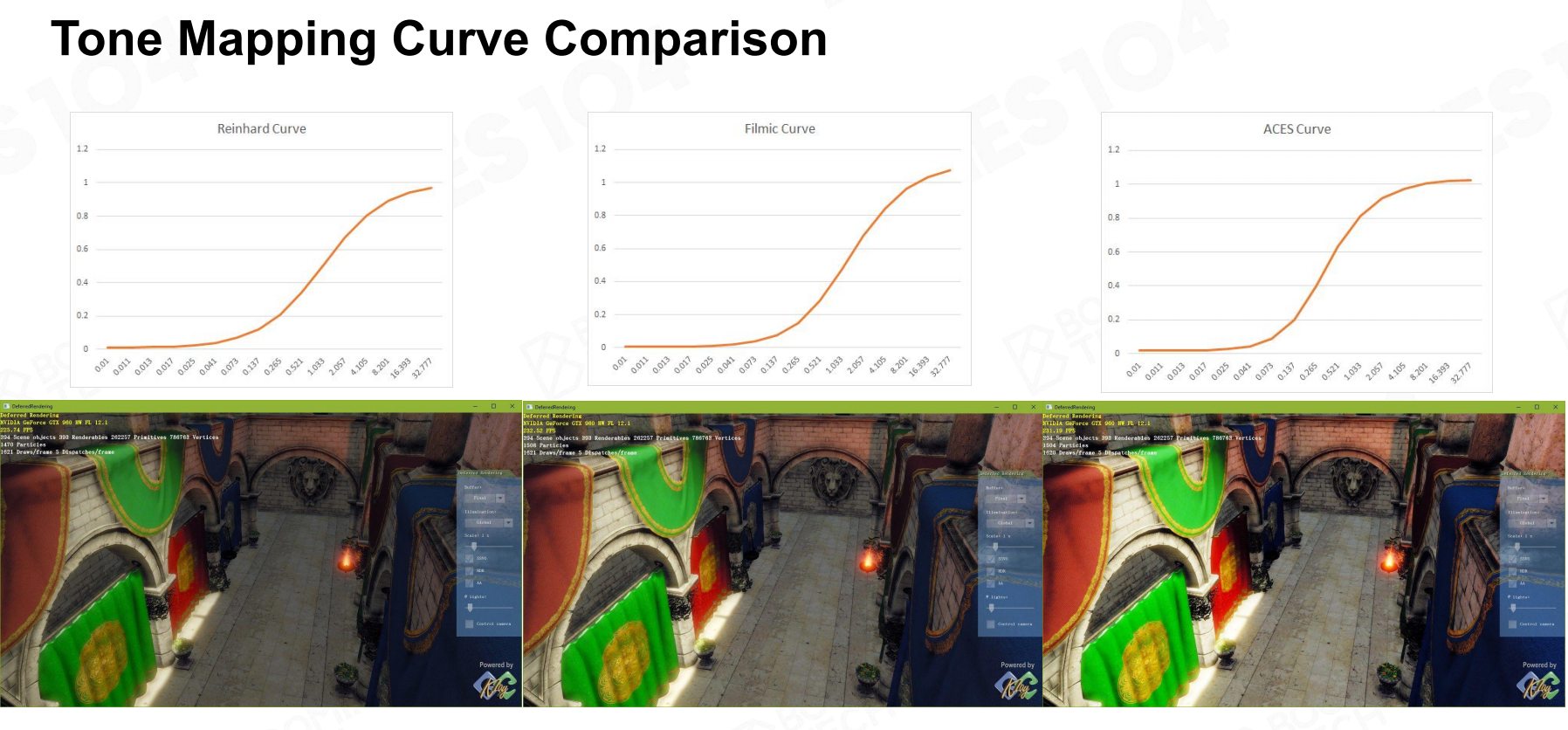 三条色调映射效果对比
三条色调映射效果对比
Color Grading
Color Grading用来调整画面的色调,以达到烘托气氛或特殊的画风效果。
通常的处理方式为:对原有像素颜色通过查表的变为需要的颜色。映射的表称为Lookup Table (LUT)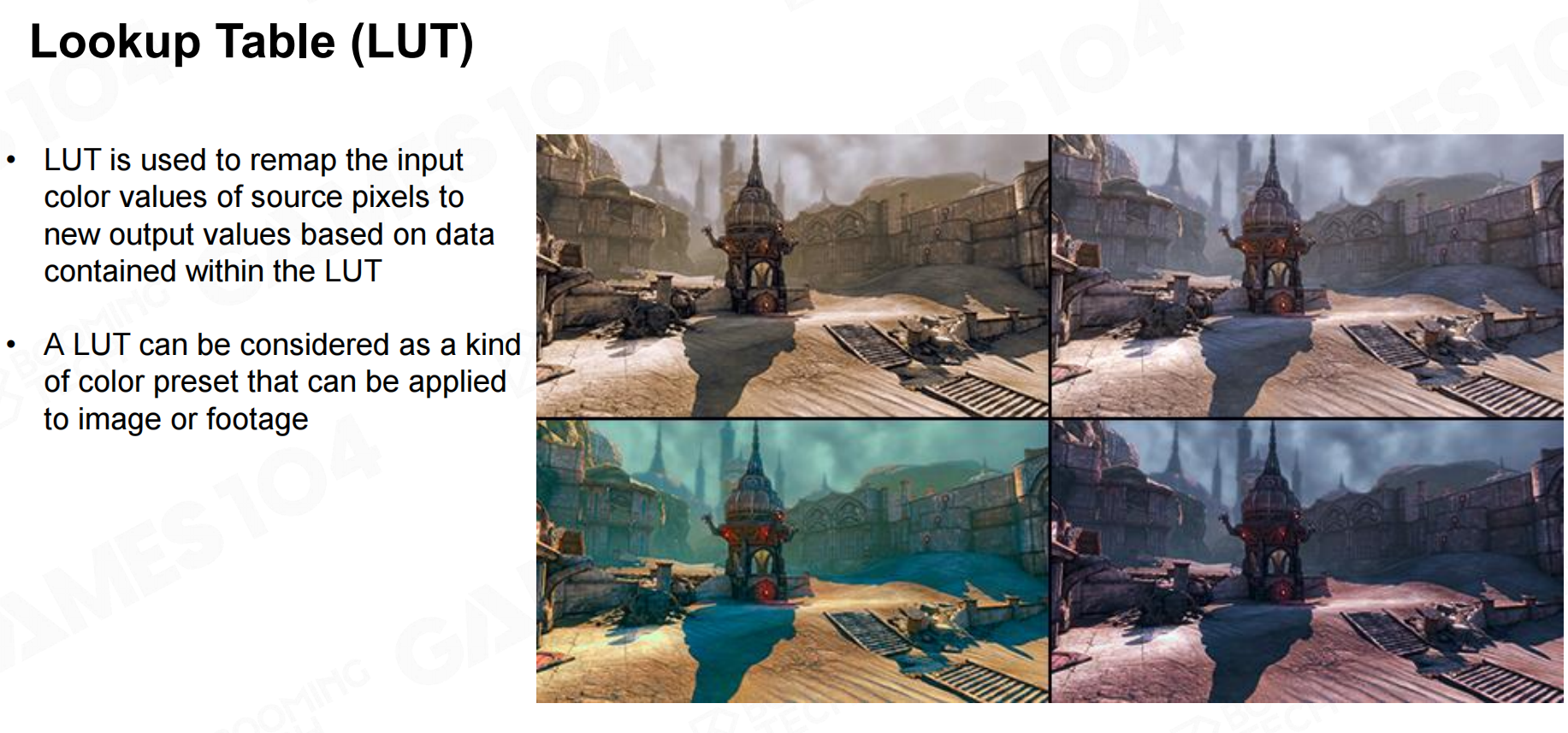 LUT
LUT
因为颜色是连续的,将3D颜色空间转换到2D纹理使用起来效果差不多。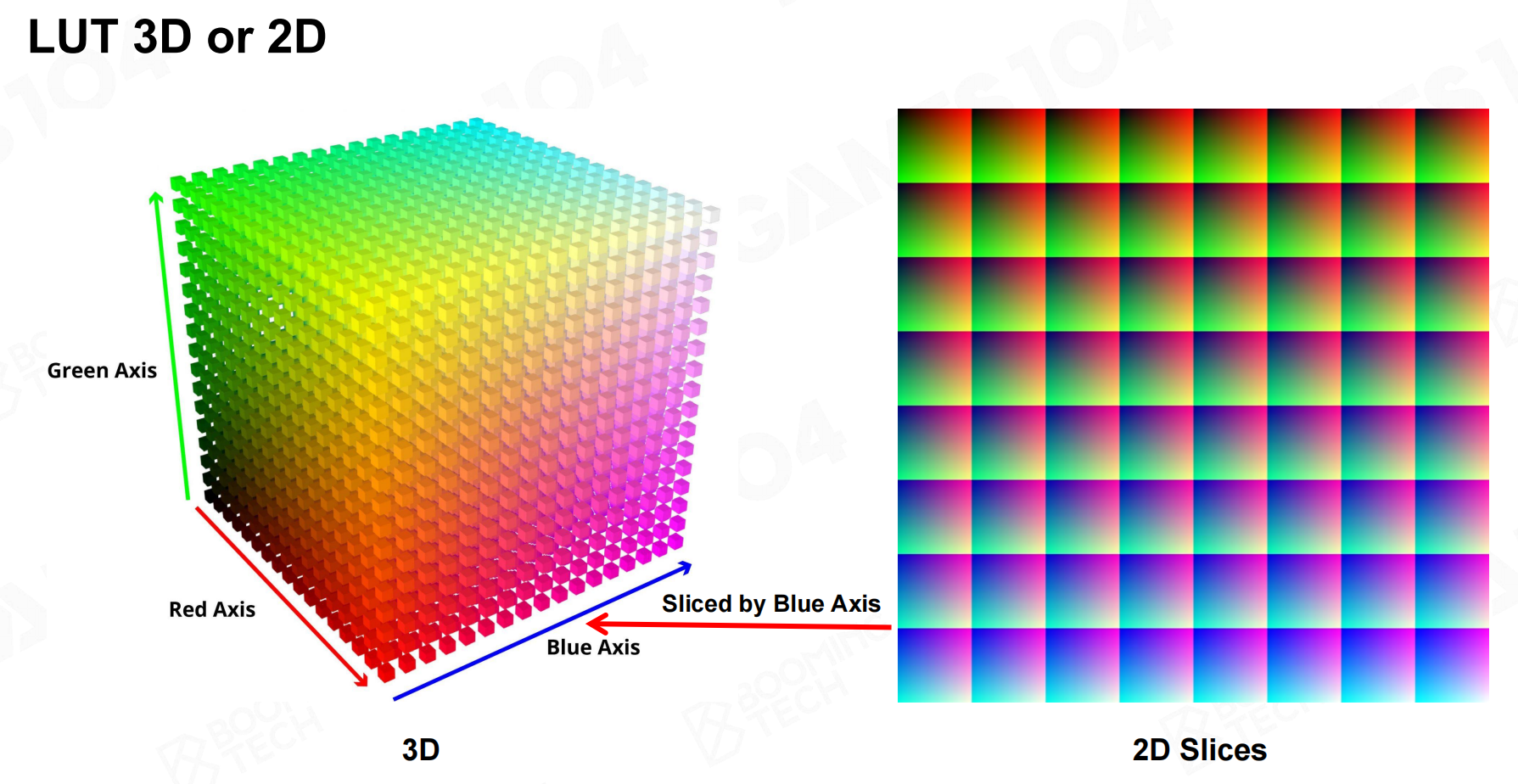 3D颜色空间到2D纹理
3D颜色空间到2D纹理
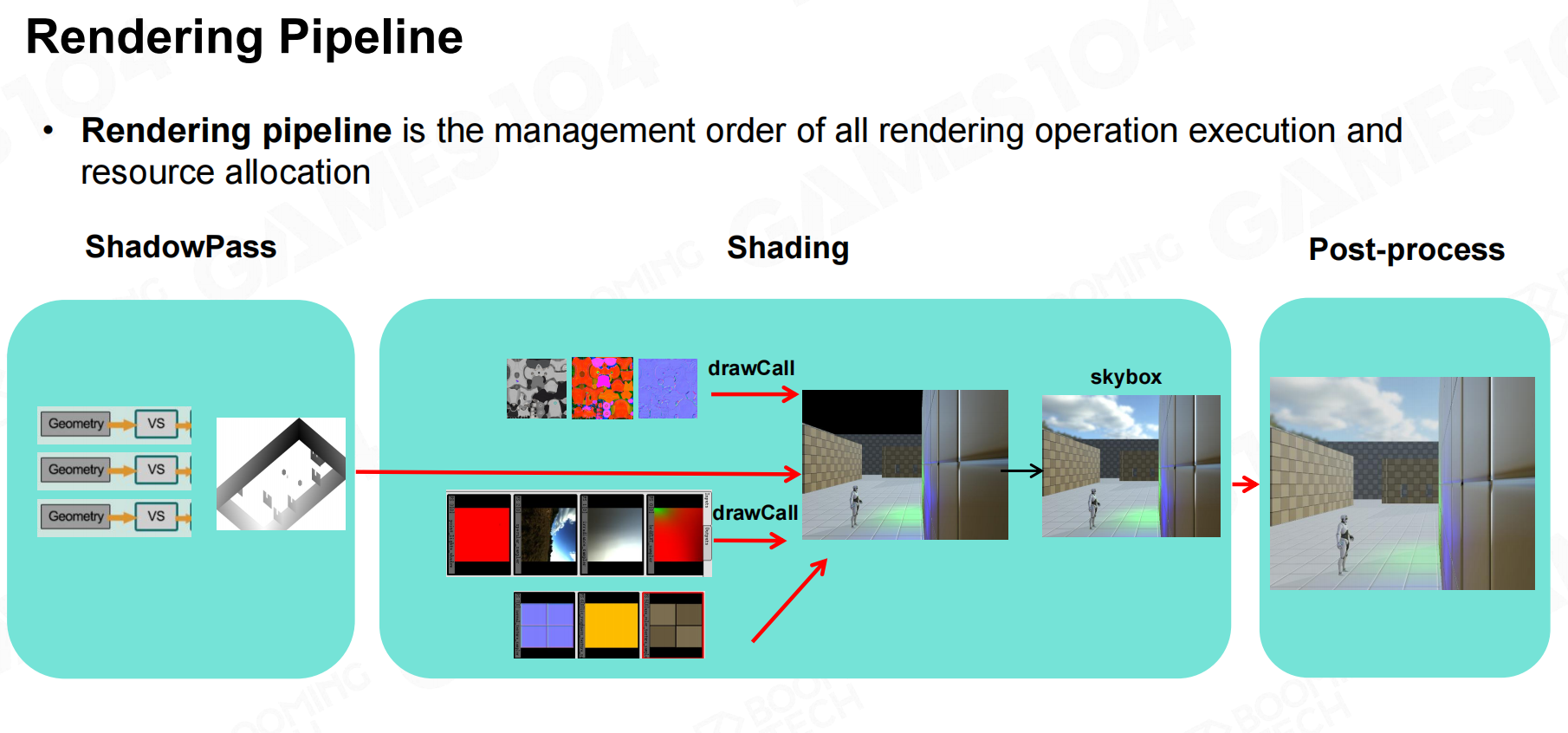
渲染管线
到目前为止,渲染的需要处理的内容基本都涉及了:渲染方程、大地、天空、AO等。
但还有一个核心问题:如何将我们提到的渲染相关的内容串联起来,使得整个渲染系统能够正常工作?
渲染管线就是来管理整个渲染的流程。
前向渲染(Forward Rendering)
 前向渲染
前向渲染
物体渲染顺序:总体来说,先由近及远渲染不透明物体(避免OverDraw),再由远及近渲染半透明物体(处理颜色混合)
半透明物体穿插绘制问题无法完美解决,只能用物体的中心点进行排序处理。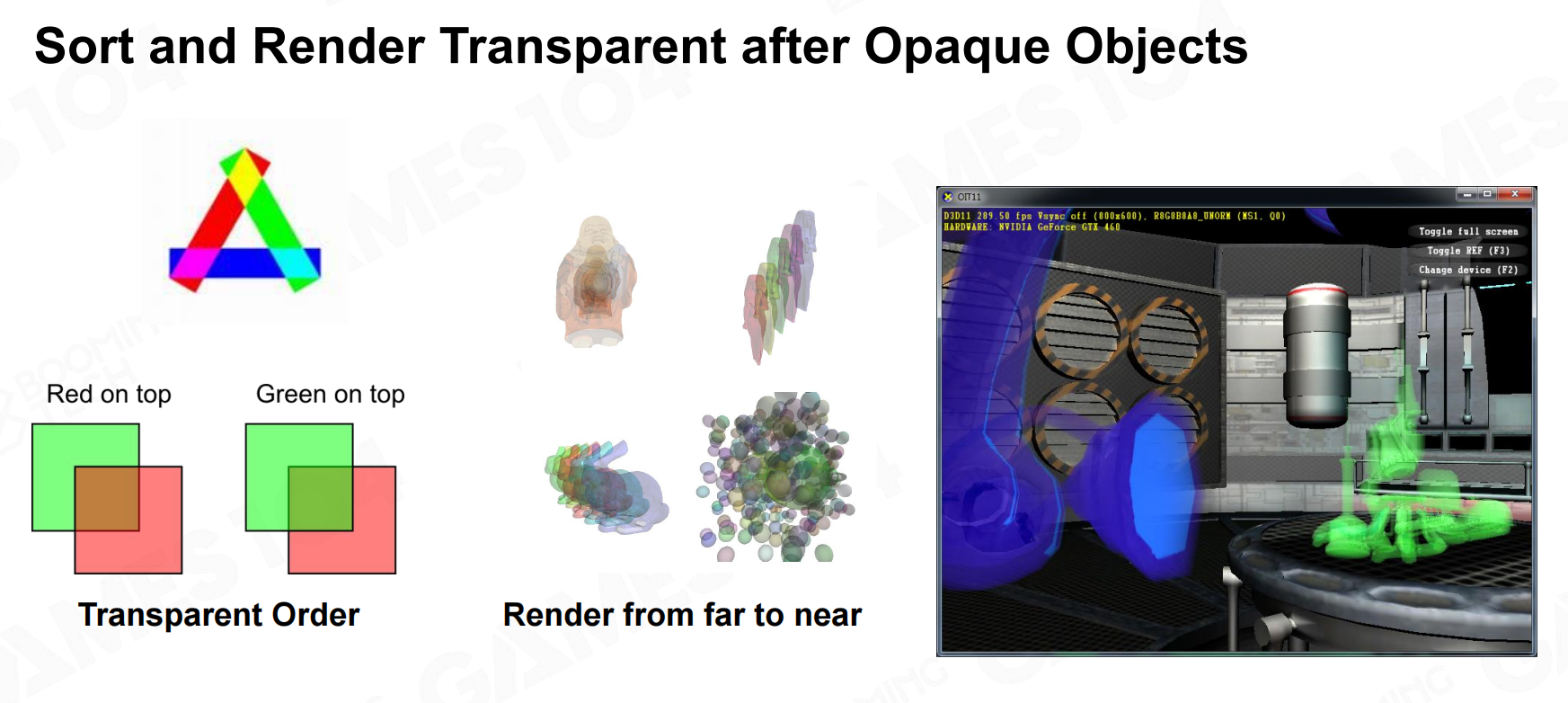 排序和渲染透明对象
排序和渲染透明对象
延迟渲染(Deferred Rendering)
前向渲染的问题就在于,每有一个光源就要对渲染物体处理一遍。当场景中存在大量光源时,开销太大。Deferred Rendering为了避免这种情况,
提出了两个Pass的处理方案:第一个Pass存储屏幕像素需要的几何信息(GBuff);第二个Pass针对像素进行逐光源处理。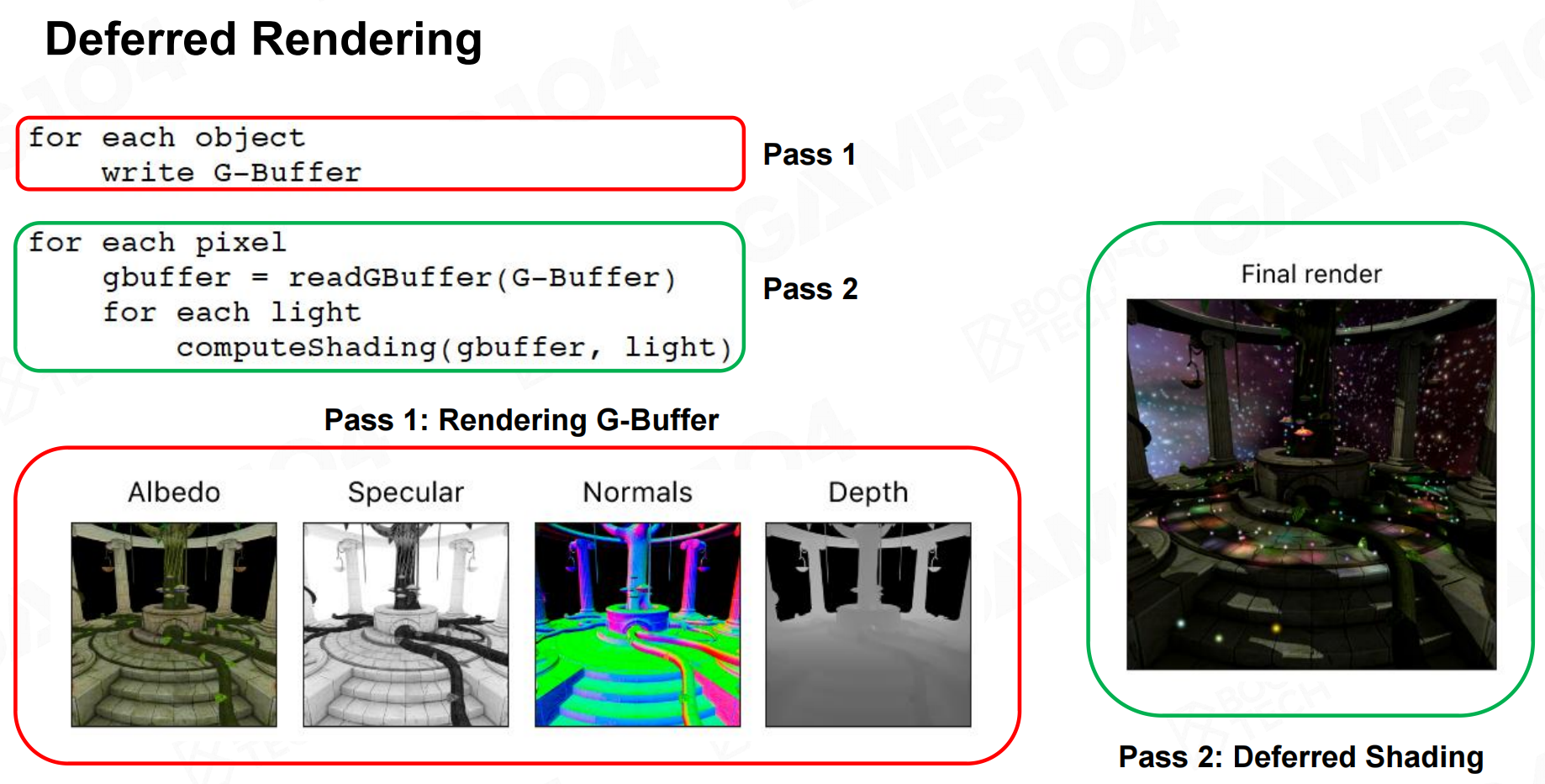 延迟渲染
延迟渲染
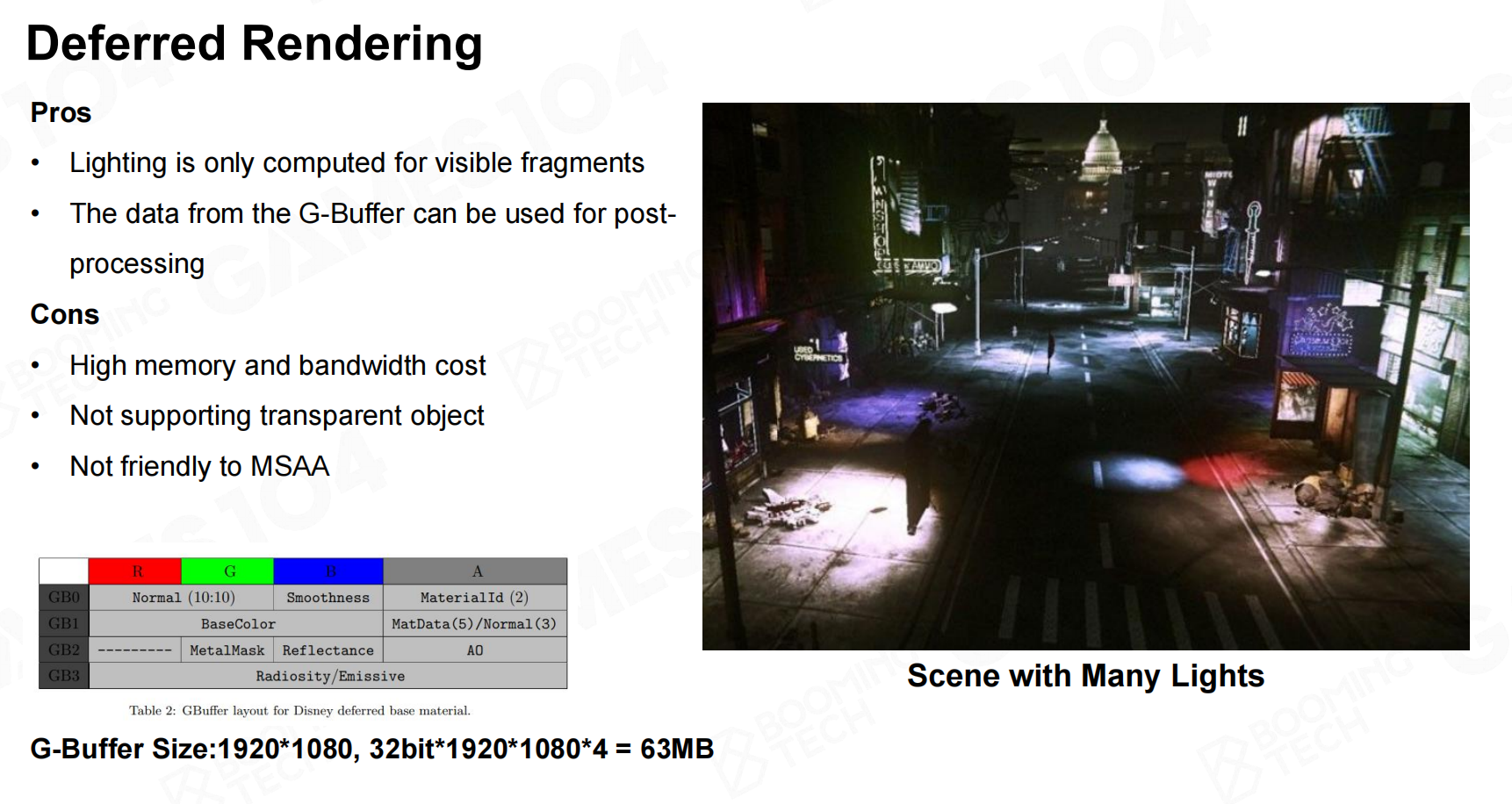
优点
- 只计算可见顶点光照
- G-Buffer的数据,后处理能拿来用
缺点:
- 高内存占用
- 不支持透明对象
- 对MSAA不友好延迟渲染优缺点
分块渲染(Tile-based Rendering)
由于移动端的带宽、内存以及散热极其敏感,常规的PC GPU架构并不适合。为了应对这一问题,
现代移动端设备通常使用Tile-based Rendering的GPU架构:将画面拆分成许多小块(Tile),渲染绘制时针对Tile进行处理。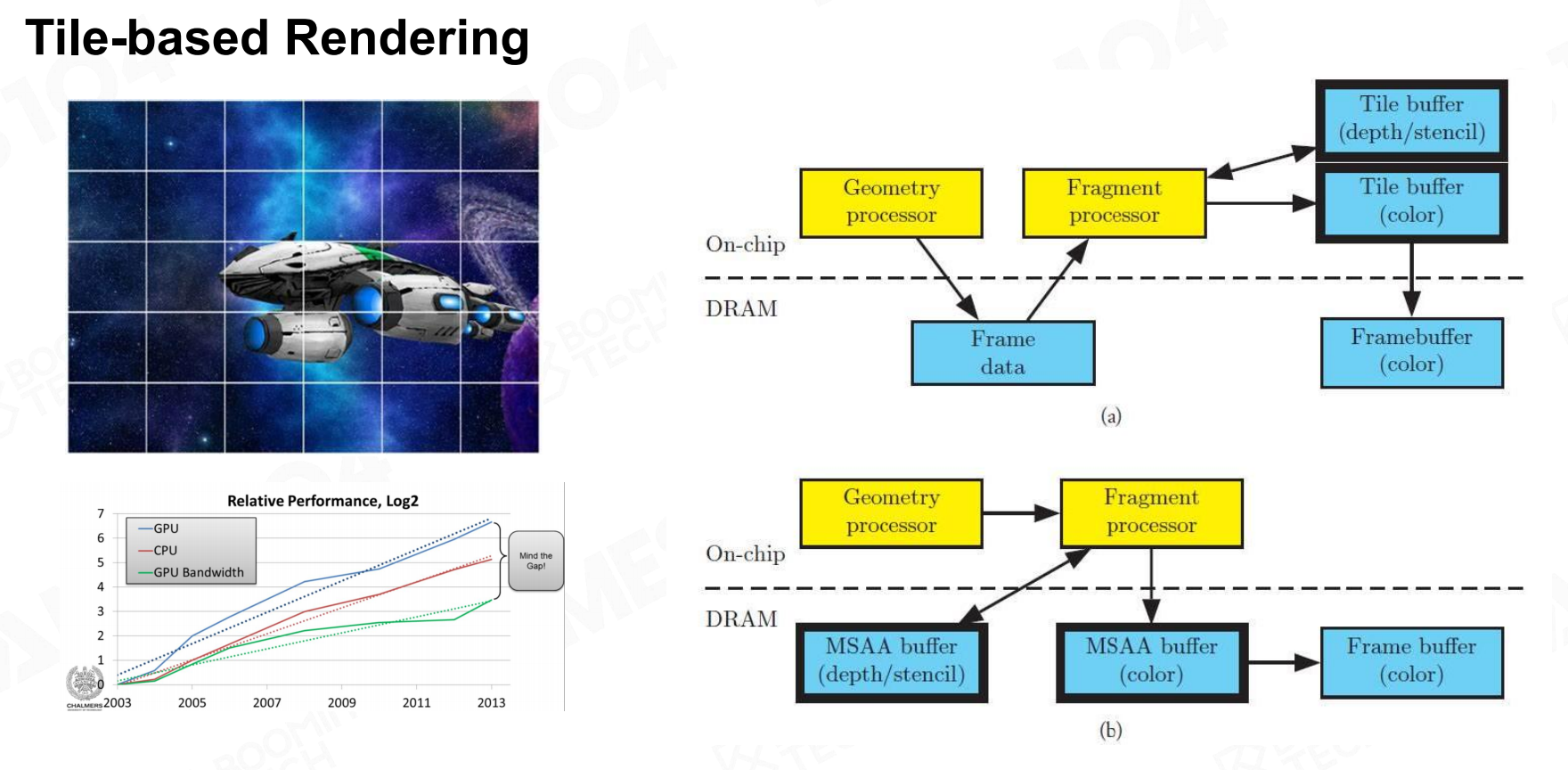 分块渲染
分块渲染
优点:
- 较少GPU的读写压力;
- 将Light附着到Tile优化Light处理;
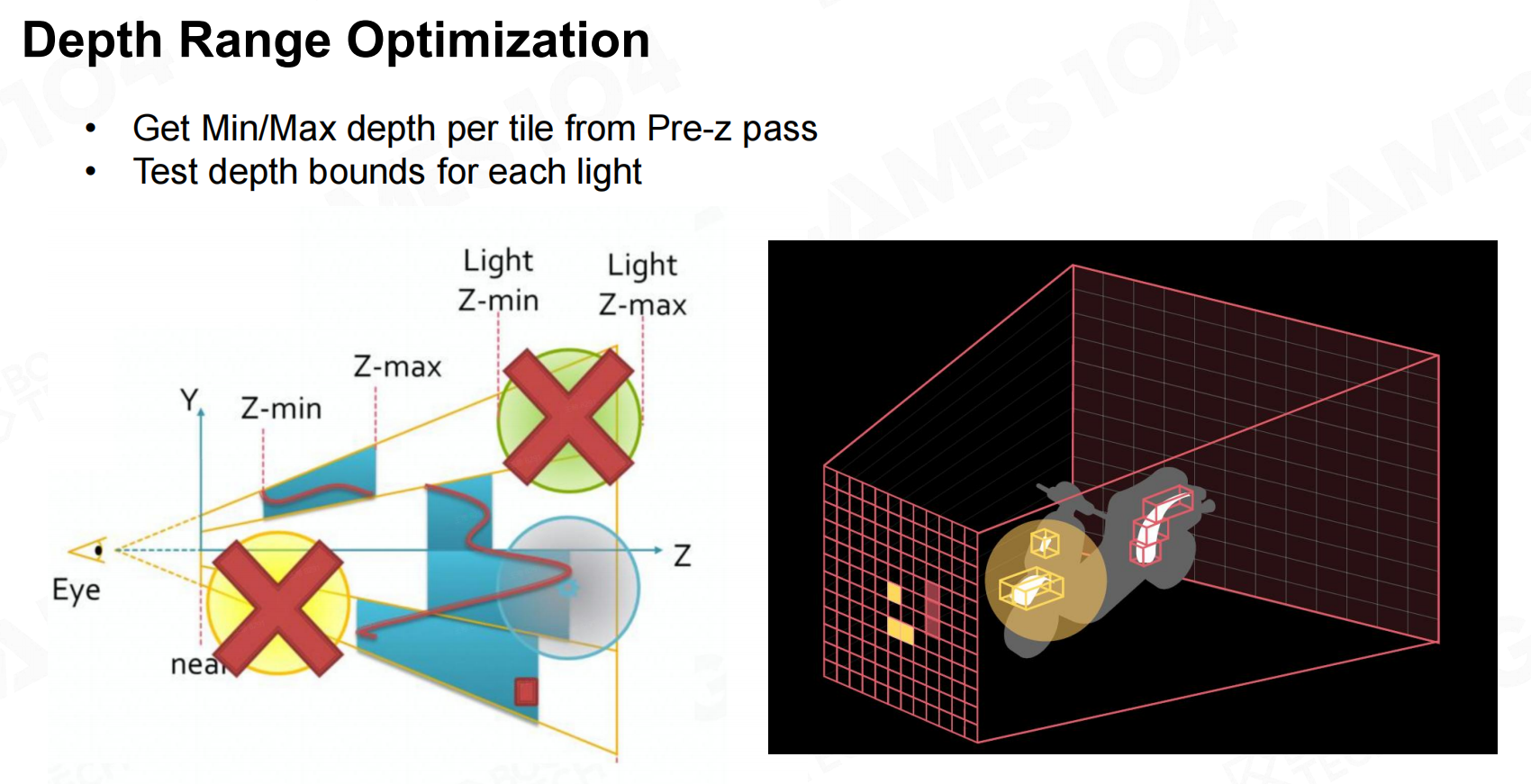
- 根据Pre-Z与光照范围减少光照计算屏幕瓷砖中的灯光列表深度范围优化
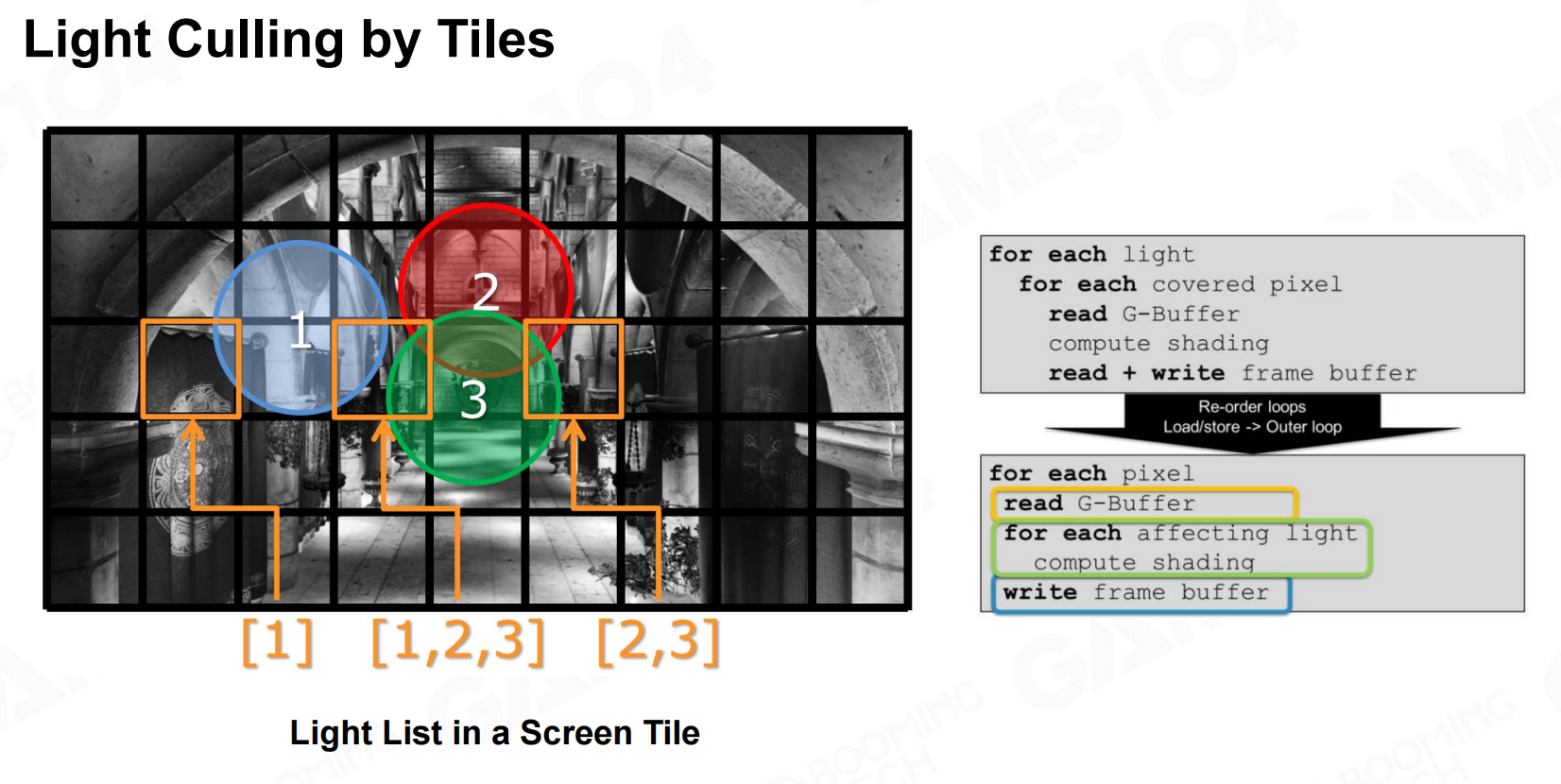
Forward+(Tile-based Forward) Rendering :对Forward模式使用Tile-based Rendering
TBDR(Tile-based Deferred Rendering):对Deferred模式使用Tile-based Rendering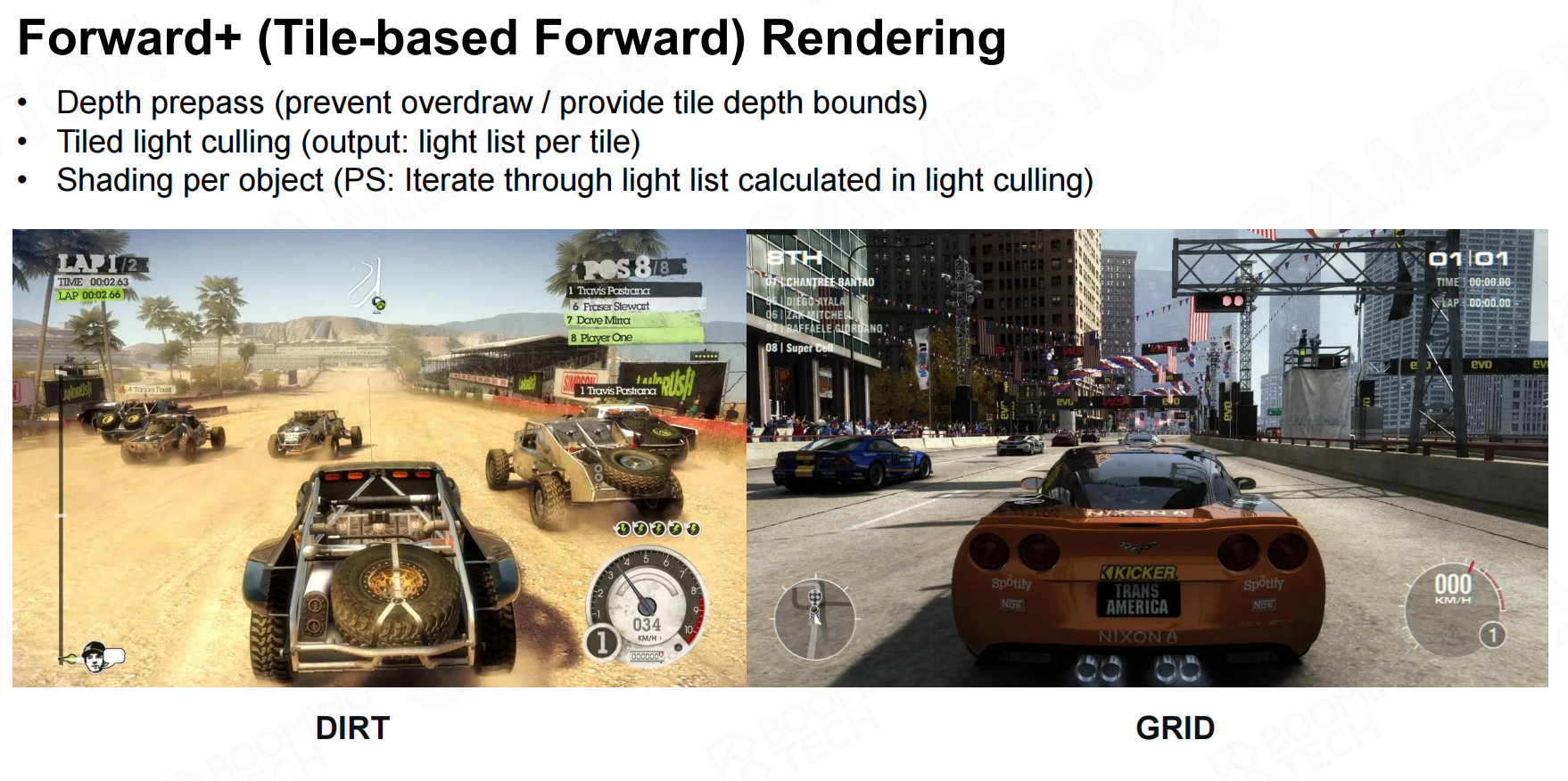 Forward+ Rendering
Forward+ Rendering
基于集群的渲染(Cluster-based Rendering)
将视图空间划分为多个四棱锥(Cluster),每个Tile单独计算Light的可见性。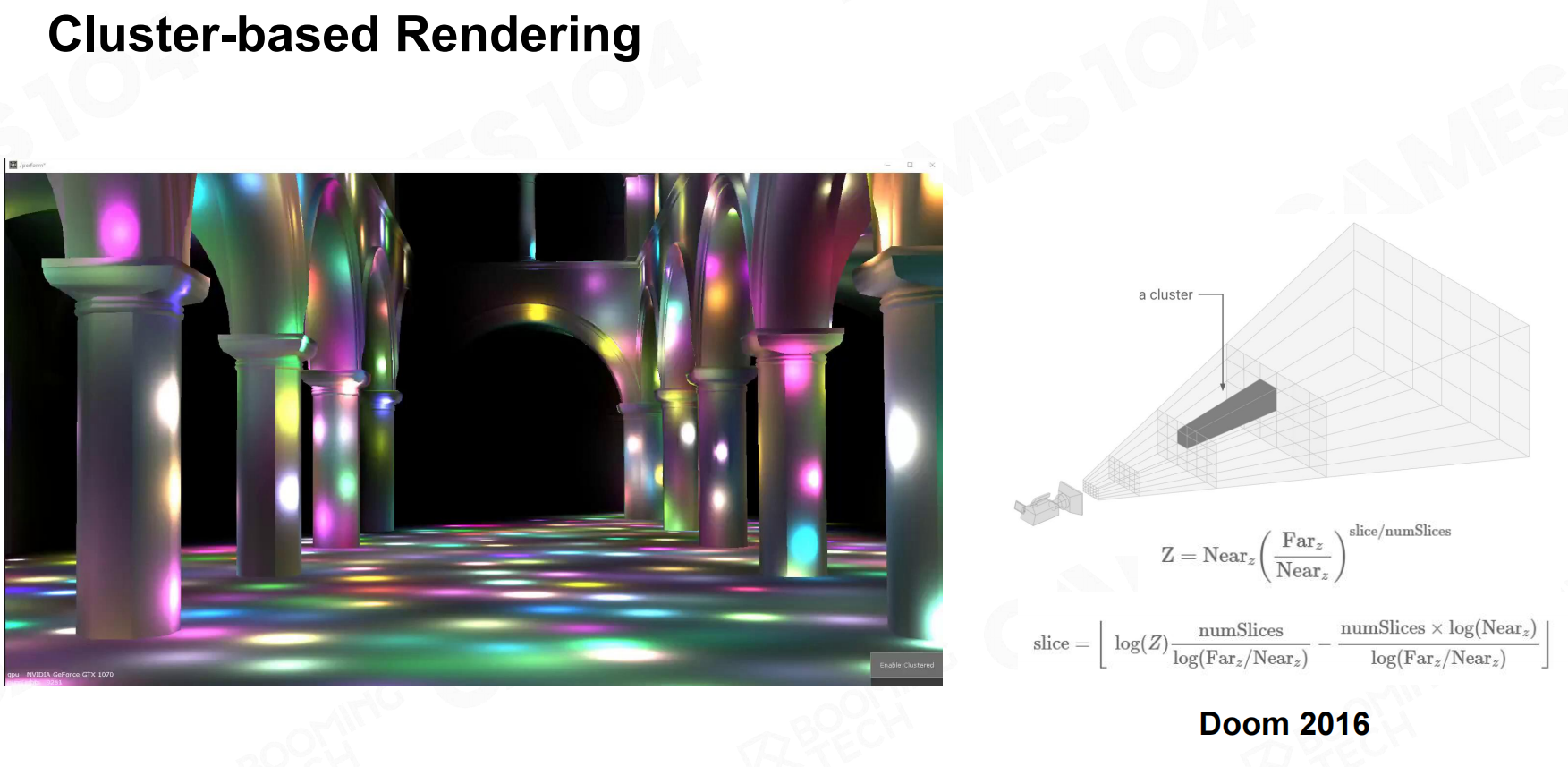 Cluster-based Rendering
Cluster-based Rendering
可见性缓冲区(Visibility Buffer)
Visibility Buffer的基本思路是在前一个Pass中生成一个类似于GBuffer的全屏Buffer,
其中的每个texel只存primitive ID、uv和贴图ID,进而得到与之关联的所有属性值,法线、粗糙度等等。
Deferred Rendering在完成GBuff存储之后,就无法再获取原始的Mesh相关数据了;
而Visibility Buffer很好处理了这种问题, 对于复杂几何体来说,能够提供更好的细节效果。 Visibility Buffer
Visibility Buffer
优点:
- 提供更好的几何数据;
- 内存、带宽压力小=>可以使用MSAA
缺点:计算消耗变大(索引不同纹理)
框架图(FrameGraph)
可视化依赖和分析管理pipeline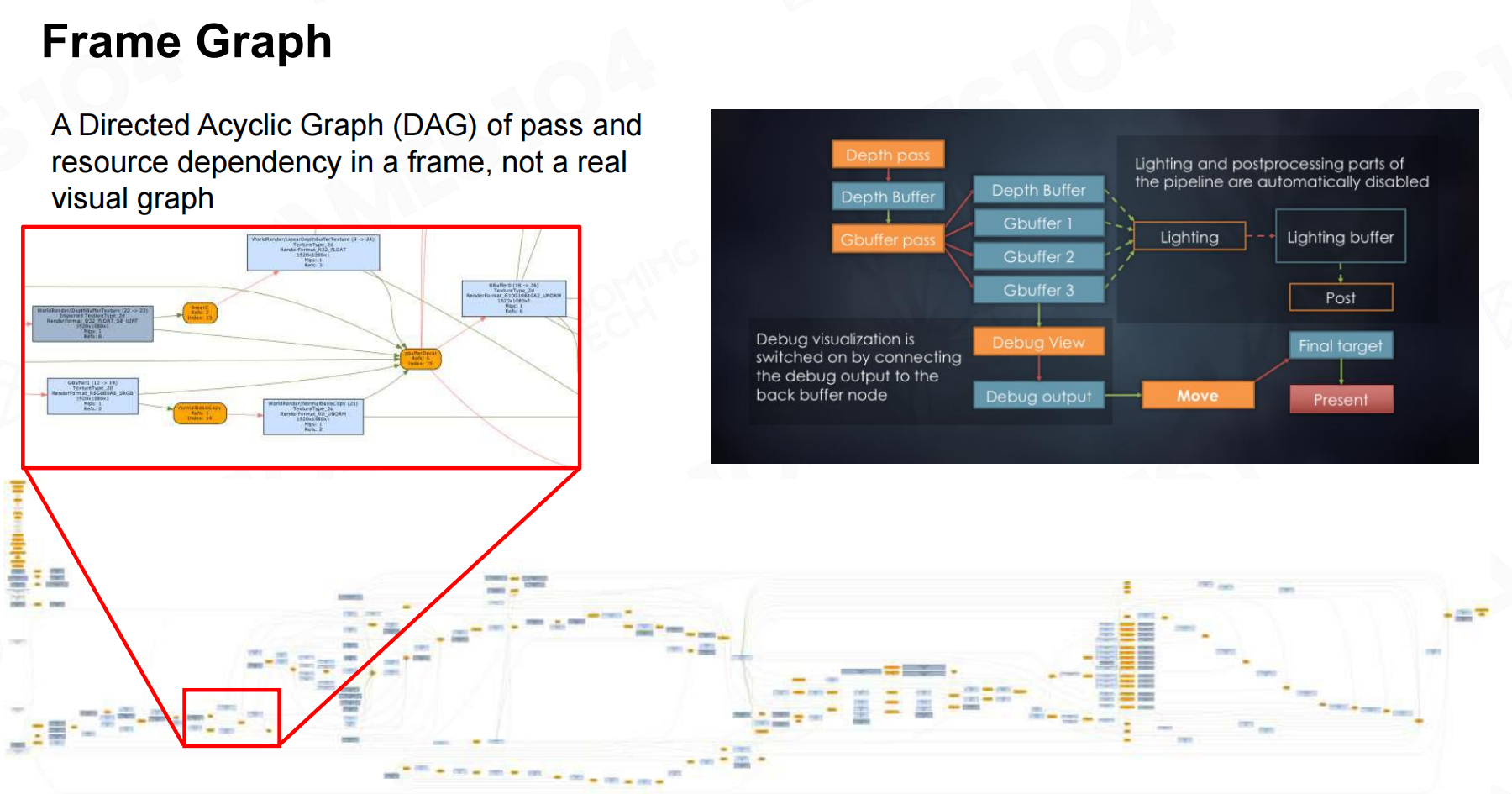 FrameGraph
FrameGraph
V-Sync&&G-Sync
游戏画面出现画面撕裂问题,学术名叫Screen Tear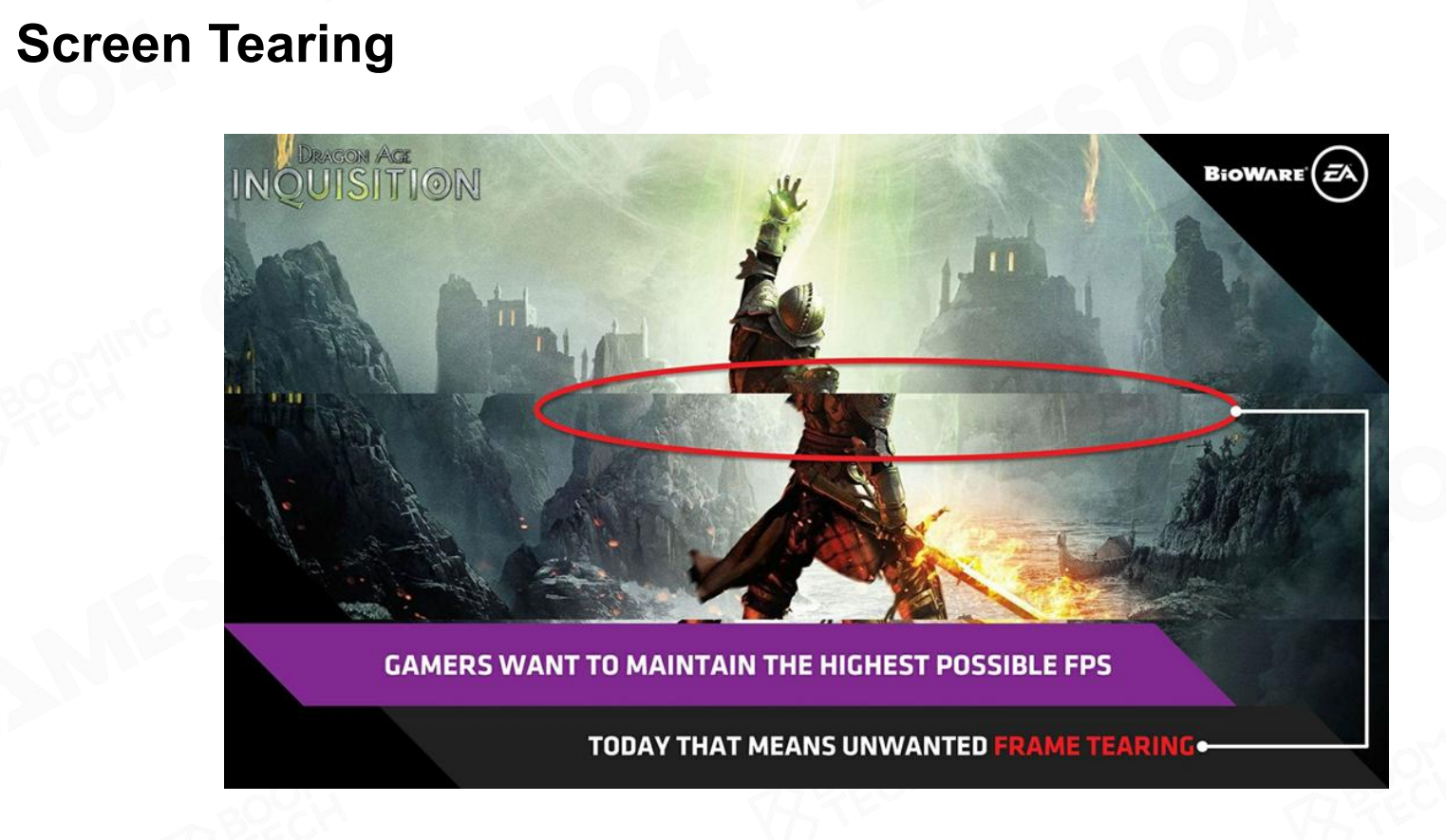 画面撕裂
画面撕裂
画面撕裂的原因:引擎渲染不同帧复杂程度不同,所以GPU帧率不固定,但是显示器刷新是固定的。
如果在显示器的刷新间隔中间,GPU完成了渲染,就会造成屏幕撕裂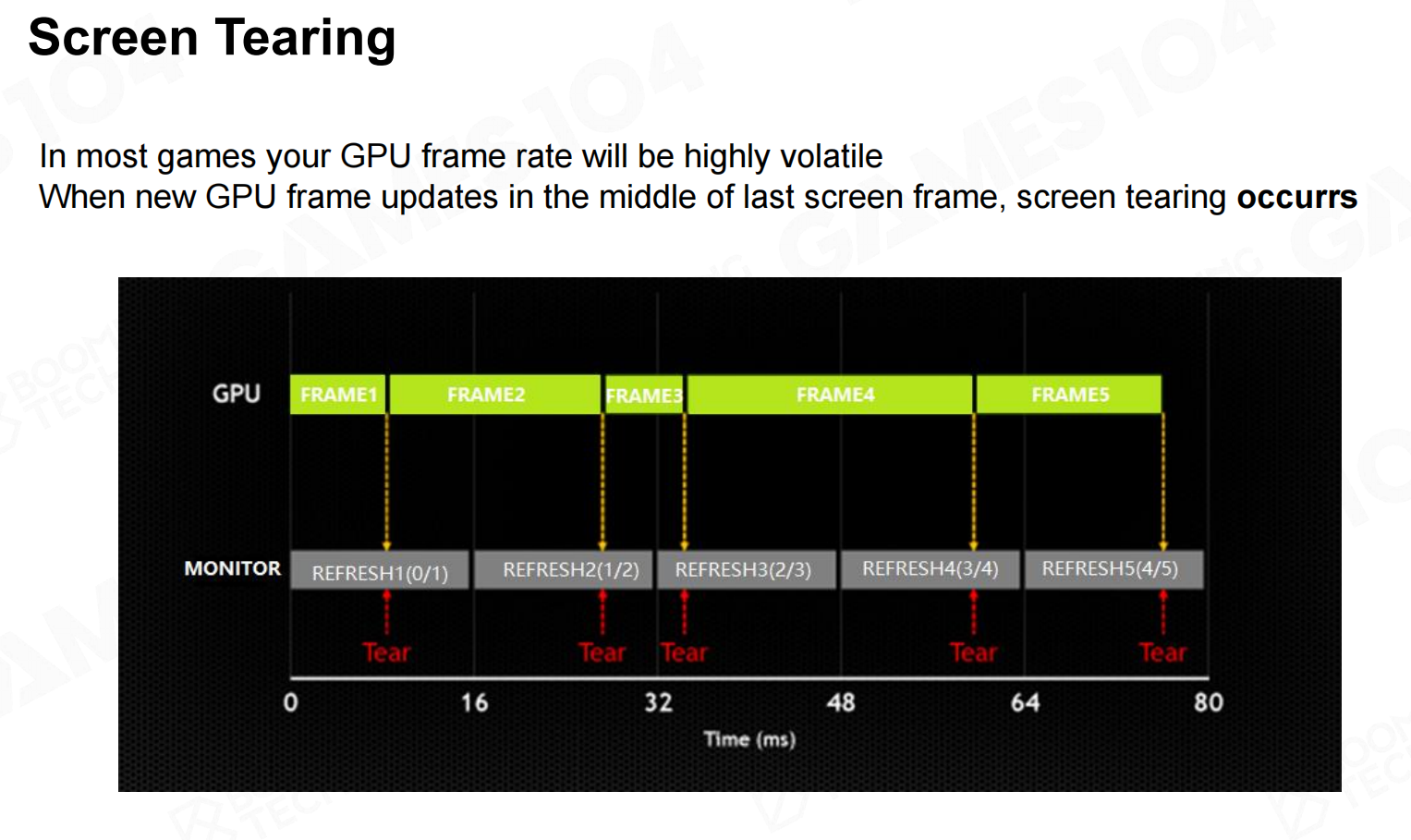 画面撕裂原因
画面撕裂原因
垂直同步,是为了解决画面撕裂问题。就是降低帧率,等FrameBuffer写完,再一起刷新界面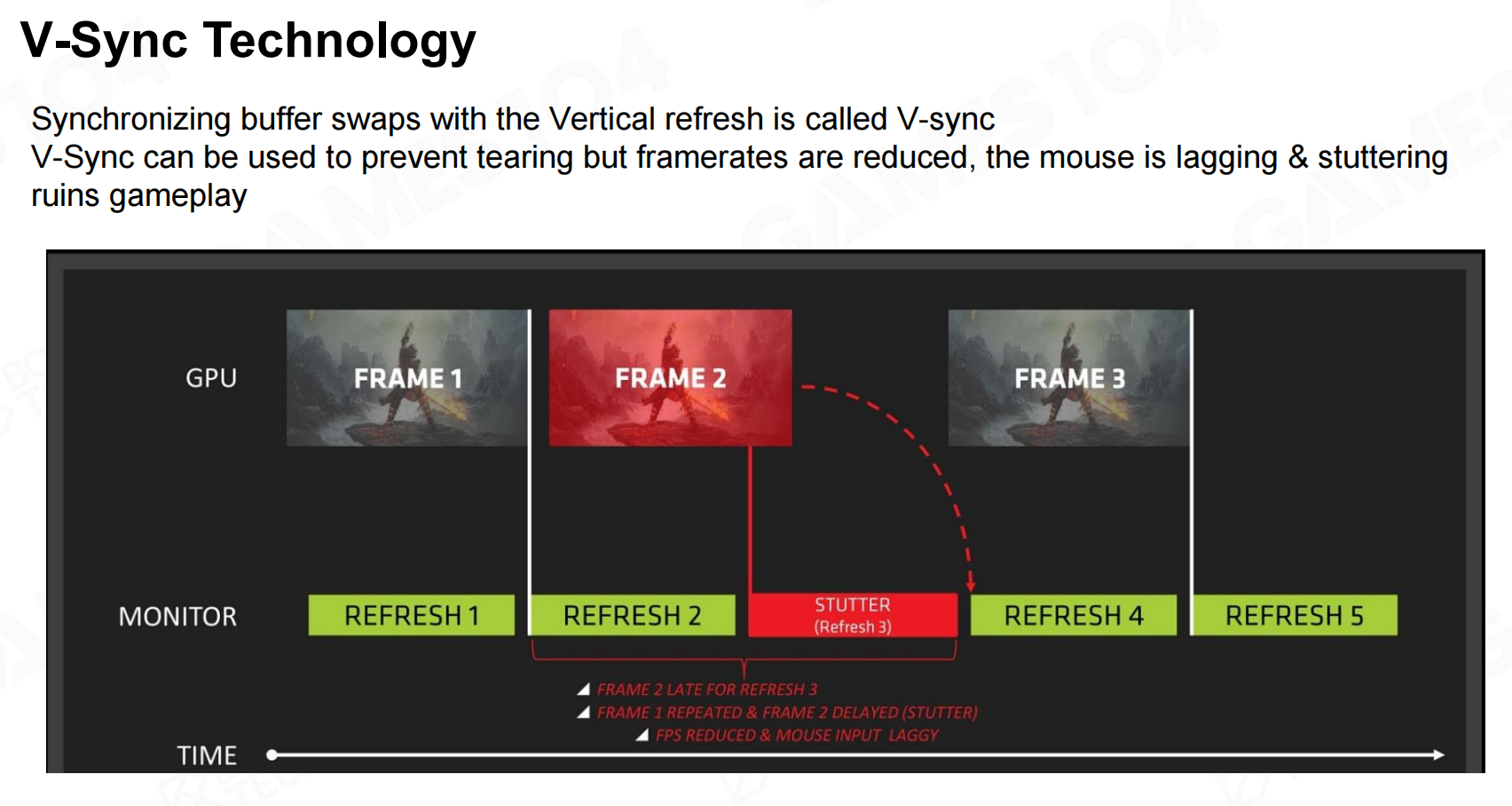 垂直同步
垂直同步
可变刷新率(Variable Refresh Rate)
显示器自适配游戏帧率技术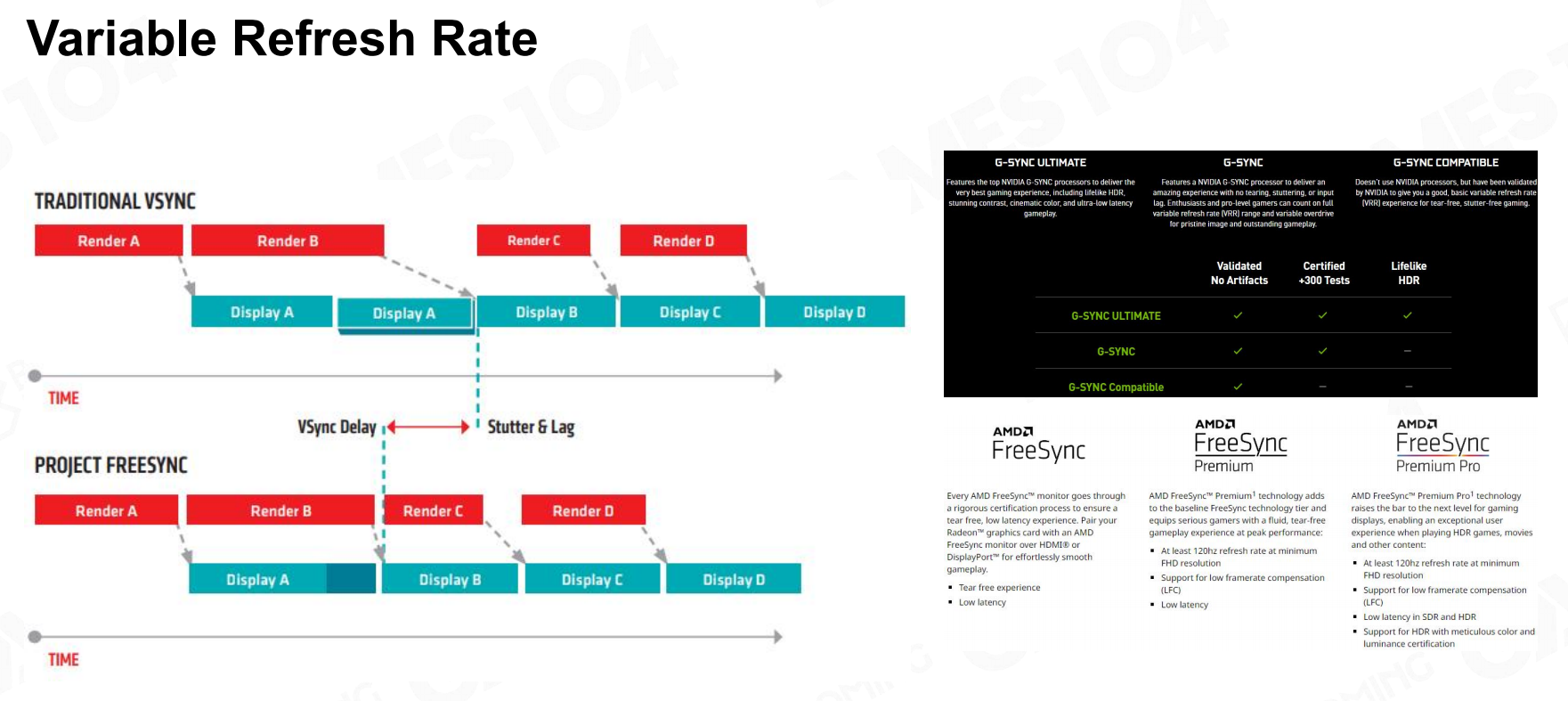 Variable Refresh Rate
Variable Refresh Rate
引用
- 本文作者:樱白 - Cherry White
- 本文链接:https://cherry-white.github.io/posts/ed8f511c.html
- 版权声明:本博客所有文章均采用 BY-NC-SA 许可协议,转载请注明出处!
☕ 如果这篇文章对你有帮助
欢迎请我喝杯咖啡,支持持续创作